





Submitted by E. Silles
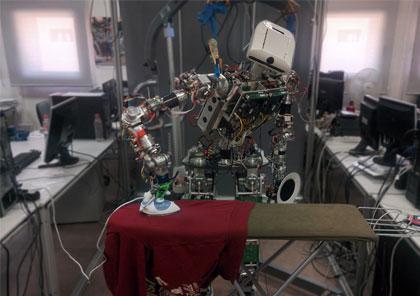
Researchers at the Robotics Lab UC3M have developed the world's first humanoid robot that can iron garments using the TEO robot. This is the first advance towards an autonomous Robot Household Companion that can perform laundry.
The method is inspired by how humans perform the ironing task. It uses 3D perception using a RGB-D sensor, to obtain a 3D representation of the garment and the wrinkles and creases present. Using a custom Wrinkleness Local Descritor (WiLD), it computes the most suitable ironing paths to reduce the overall wrinkleness of the garment. Once the path has been found, the robot reproduces this path with force/torque control, to have a fine control of the pressure exerted when ironing. The process is repeated iteratively until no wrinkles/creases are left. The main advantage of this method is that it can be applied in unmodified domestic environments, using unmodified human tools (i.e. iron and ironing board).
This work is to be published on the upcoming 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017) that will be held in Vancouver, Canada, September 24-28, 2017. A preview of the paper can be downloaded from: arxiv