ADAM
Assistive mobile manipulator robot with two arms designed to perform tasks in the home environment for elderly people.

Assistive mobile manipulator robot with two arms designed to perform tasks in the home environment for elderly people.
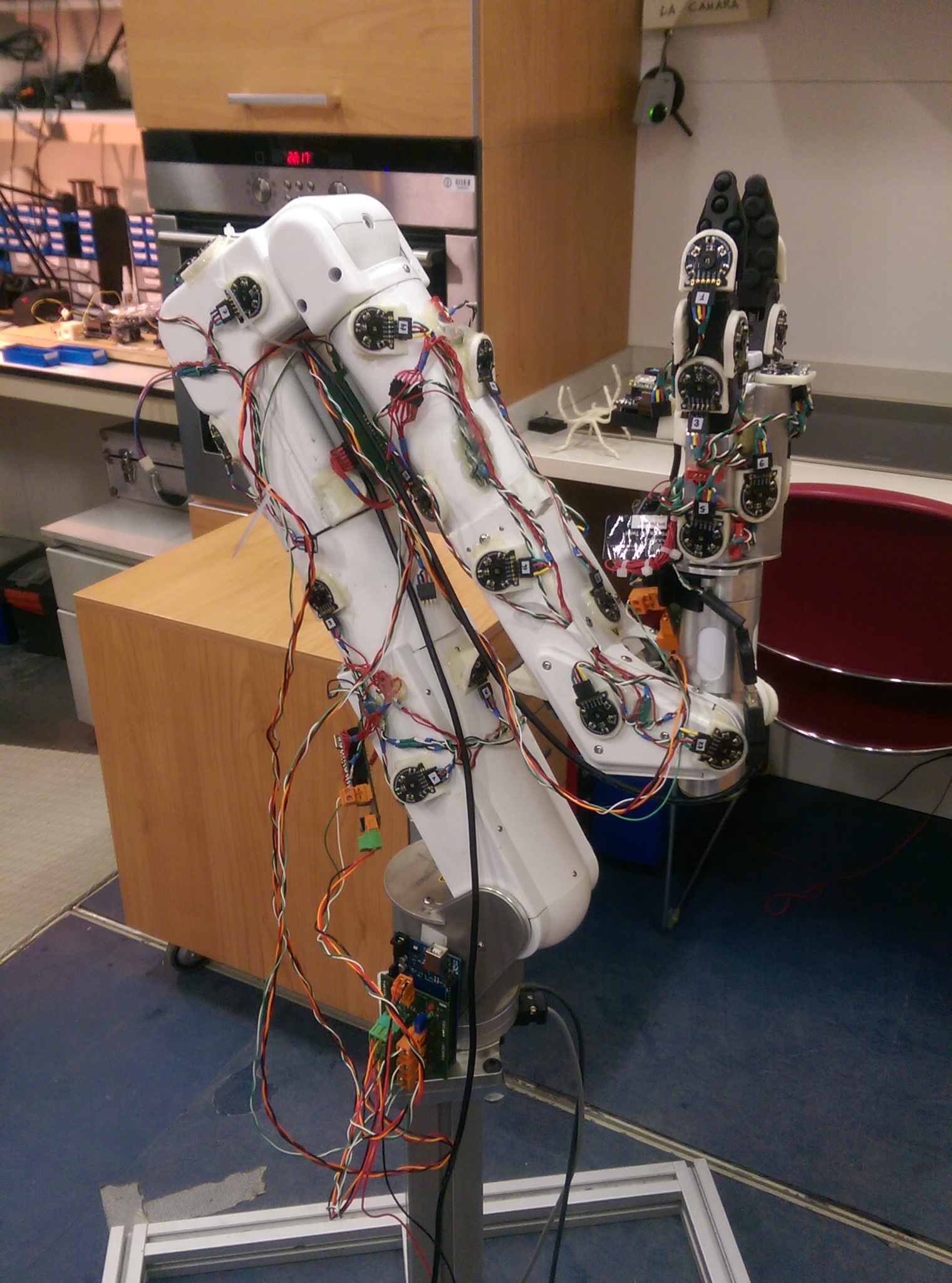
AMOR is a 7DOF robotic arm allowing to find its way even in highly cluttered environments. The arm can reach at a distance of 1 meter. Additionally, three out of its seven joints allow infinite rotation, making the robot arm highly dexterous. The arm is equipped with proximity sensors along the its body.

ASIBOT is a portable assistive robot for elderly and disabled people bringing more freedom in daily tasks as eating, drinking, shaving, make up, teeth brushing, etc. The robot has been under testing in the National Hospital of Paraplegics in Toledo.

Maggie is a personal social robot built by the Robotics Lab (University Carlos III of Madrid). It is a research platform to study human robot interaction and robot intelligence and autonomy.

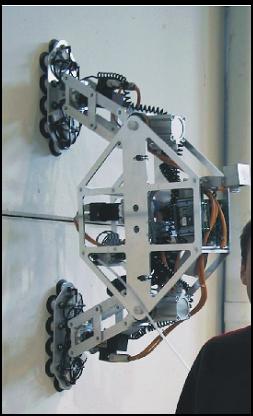
MANFRED (MAN FRiEnDly mobile manipulator) is an autonomous mobile manipulator designed to operate efficiently in environments where human manipulation capabilities are required.

The mobile robot MANFRED-2 is a mobile manipulator whose purpose is to serve as experimental platform for R&D in the mobile robots area. It has been designed to operate efficiently in environments where human manipulation capabilities are required.
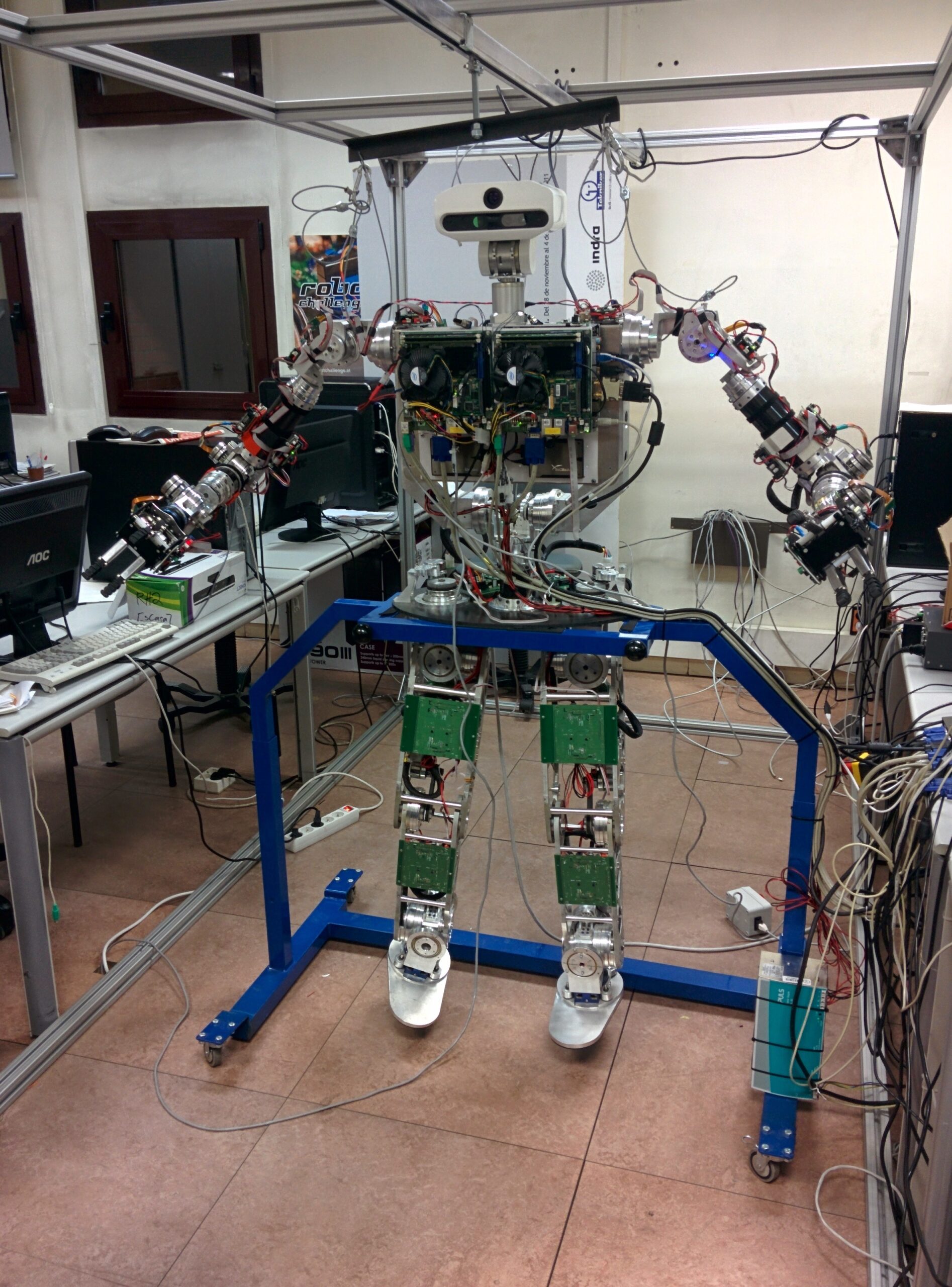
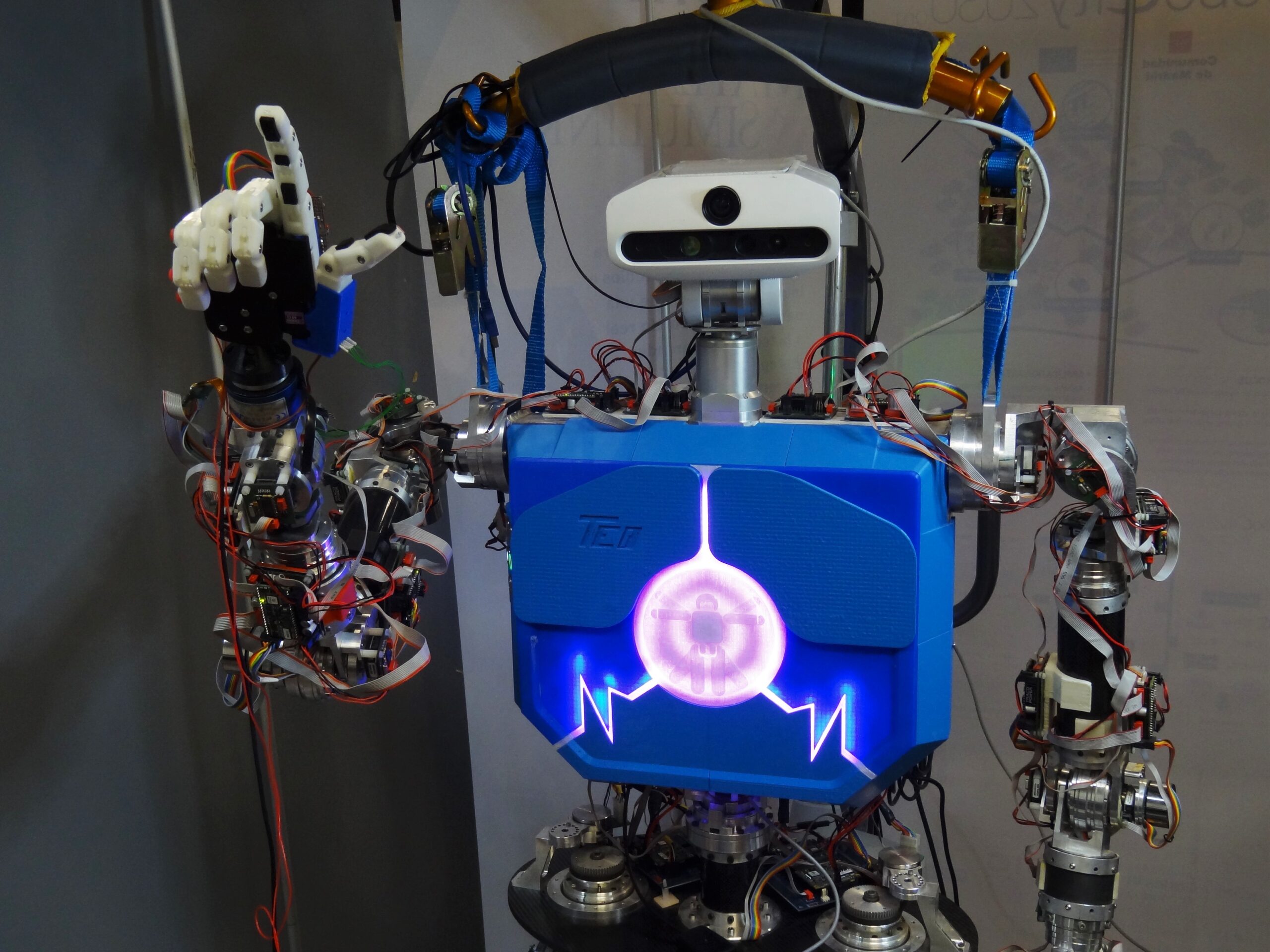
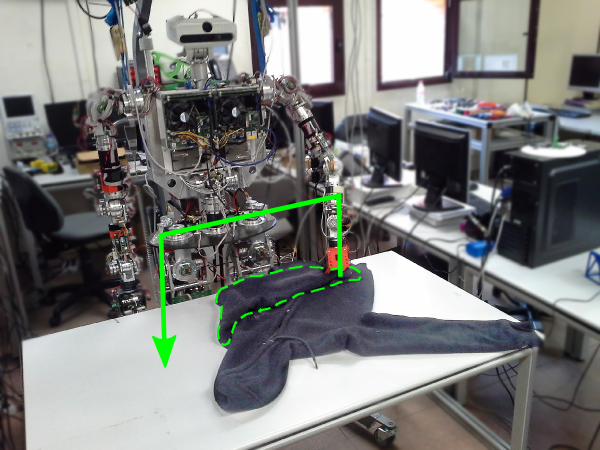
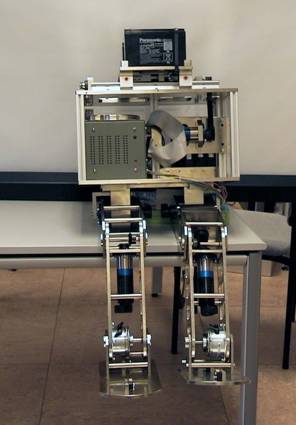
The full-size humanoid robot TEO with 28 DoF and a powerful sensorial system that includes an intelligent head with three cameras, IMU and four force/torque sensors. It is an improved version of its predecessor Rh-1. The whole platform is conceived under the premise of high efficiency in terms of energy consumption and optimization.










RoboticsLab is located at Leganes Campus of the Carlos III University of Madrid, about 10 kilometers south of central Madrid. Our offices are at the third floor of the Agustin de Betancourt building (marked 1 in the map).