
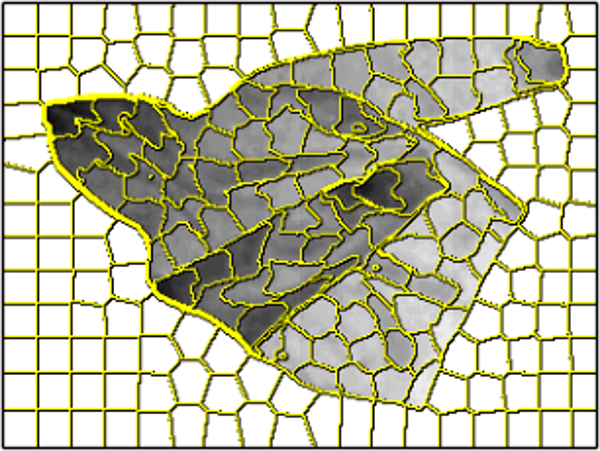
Research devoted to develop perception and manipulation algorithms to enable robots to help humans with tasks related to deformable objects, such as garments and textiles for laundry assistance.
More info at: website
Source code at GitHub:
Research devoted to develop perception and manipulation algorithms to enable robots to help humans with tasks related to deformable objects, such as garments and textiles for laundry assistance.
More info at: website
Source code at GitHub:
RoboticsLab is located at Leganes Campus of the Carlos III University of Madrid, about 10 kilometers south of central Madrid. Our offices are at the third floor of the Agustin de Betancourt building (marked 1 in the map).
Copyright © 2024 Carlos III University of Madrid. All Rights Reserved.
The material on this site may not be reproduced, distributed, transmitted, cached or otherwise used, except with the prior written permission of the Carlos III University of Madrid.
Privacy Policy | Advertising | About Us