





Submitted by E. Silles
The 7FP
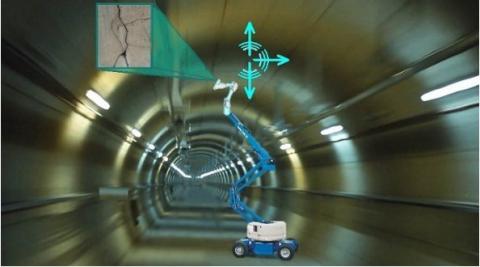
ROBO-SPECT program is developing a robotic tunnel inspection system, that
should be both quicker and more acute than human inspections.
The system will be a semi-autonomous robotic
unit, consisting of a small unmanned vehicle with a crane mounted on top of it.
On the end of that crane will be a robotic sensorized arm. The whole setup will
move down the length of a subway, motorway or other tunnel, conducting a
complete inspection in one pass. Along with cracks, faults such as rust stains,
corrosion, and exposed reinforcements will also be sought out.