The objective of this project is the simulation of some general systems of the Eurofighter Aircraft and the integration of this simulation in the tests bank SEAD3. In this project our University works for EADS-CASA.
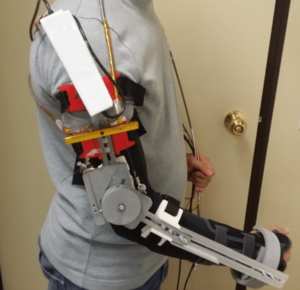
Exoskeleton for Diagnosis and Assistance in Manipulation Tasks
Start: 2016
End: 2019
Funder: MINECO
Exoskeleton for Diagnosis and Assistance in Manipulation Tasks. Development of the light-weight exoskeleton for manipulation tasks based on the SME technology.
Housing for Europe in the next century: Affordable, high quality homes for all
Start: 1999
End: 2002
Funder: EU 5th Framework Programme
The FutureHome project is part of the global R&D program IMS (EU + Japan + Canada). The project had the objective of development a modular robotics construction technology for residential housing. The On-site robotics is the core part of the projects.
The project deals with the robotization of underground construction. It is funded under the call of singular and strategic industrial projects. The main objetcive is transformation of the actual tunnelling machines (TBM) into autonomous navigation robot.
Factory automation of pre-fab GRC pieces for construction industry
Start: 2000
End: 2002
Funder: DRACE S.A. (ACS group)
The objective of the project was the automation of all the manufacturing process of the GRC pre-fab pieces factory: lay-out, transportation, spying, storage, etc. The daily operations are planned and supervised with result of 30% increase the productivity
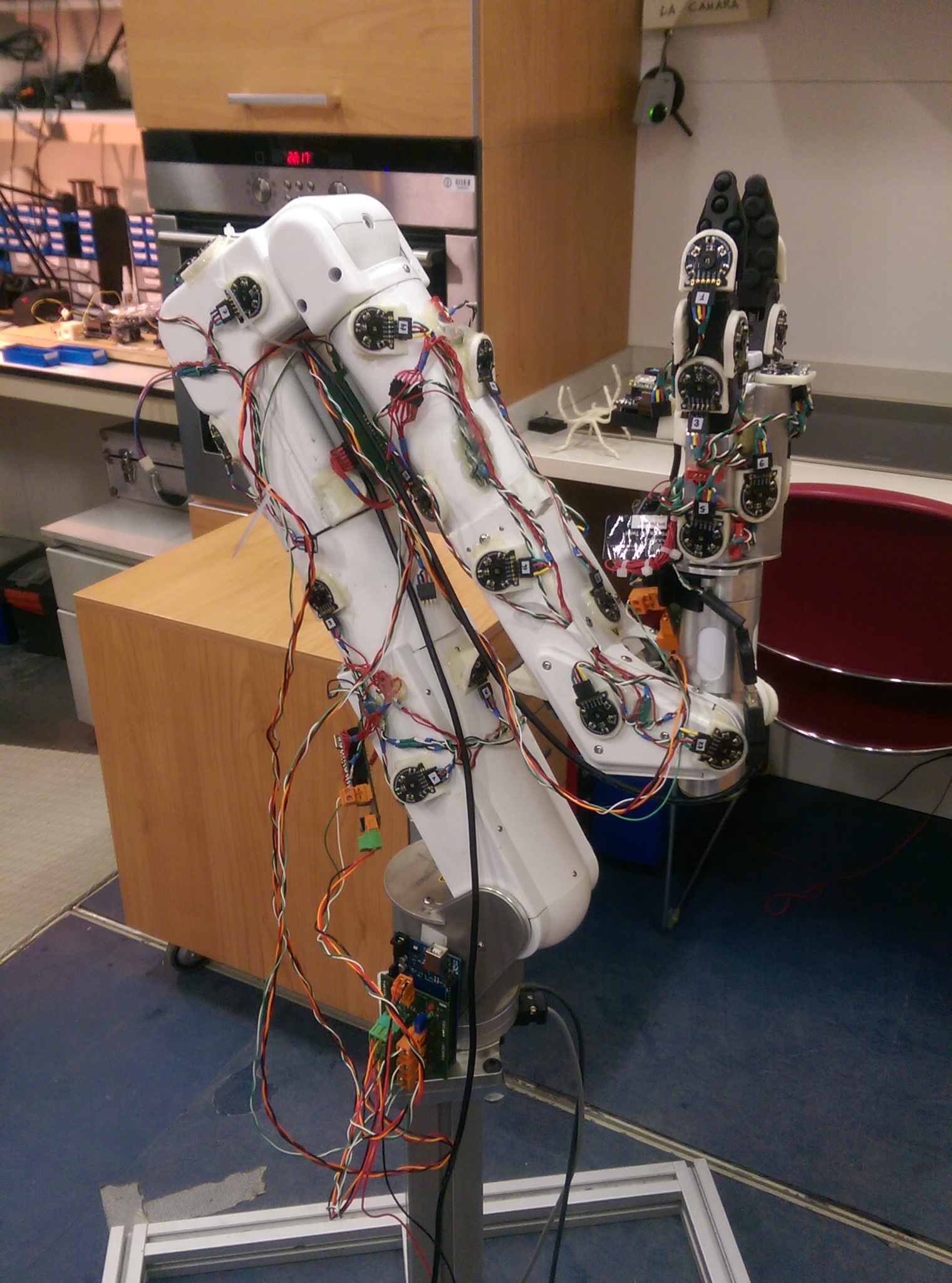
Developmental pathway towards autonomy and dexterity in robot in-hand manipulation.
Start: 2009
End: 2013
Funder: EU 7th Framework Programme
HANDLE is a Large-Scale Integrated Project funded by the EU within the 7th Framework Programme. The consortium is formed by nine partners from six EU countries: UPMC-coordinator-France, Shadow Robot Company-UK,