Heterogeneous Social-Mobile Manipulator Robot Intelligent Teams for Elderly-People Assistance
Start: 2019
End: 2022
Funder: MINISTERIO DE CIENCIA, INNOVACIÓN y UNIVERSIDADES
Based on the experience in robot navigation, object detection, planning and manipulation of the UC3M equipment and in Ambient Assisted Living (AAL) analysis of sensor data, psychology and machine learning of the UPCT-UM, it seeks to apply to an environment of older people a heterogeneous robotic system that provides physical and emotional support to an older person. The
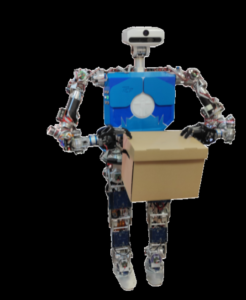
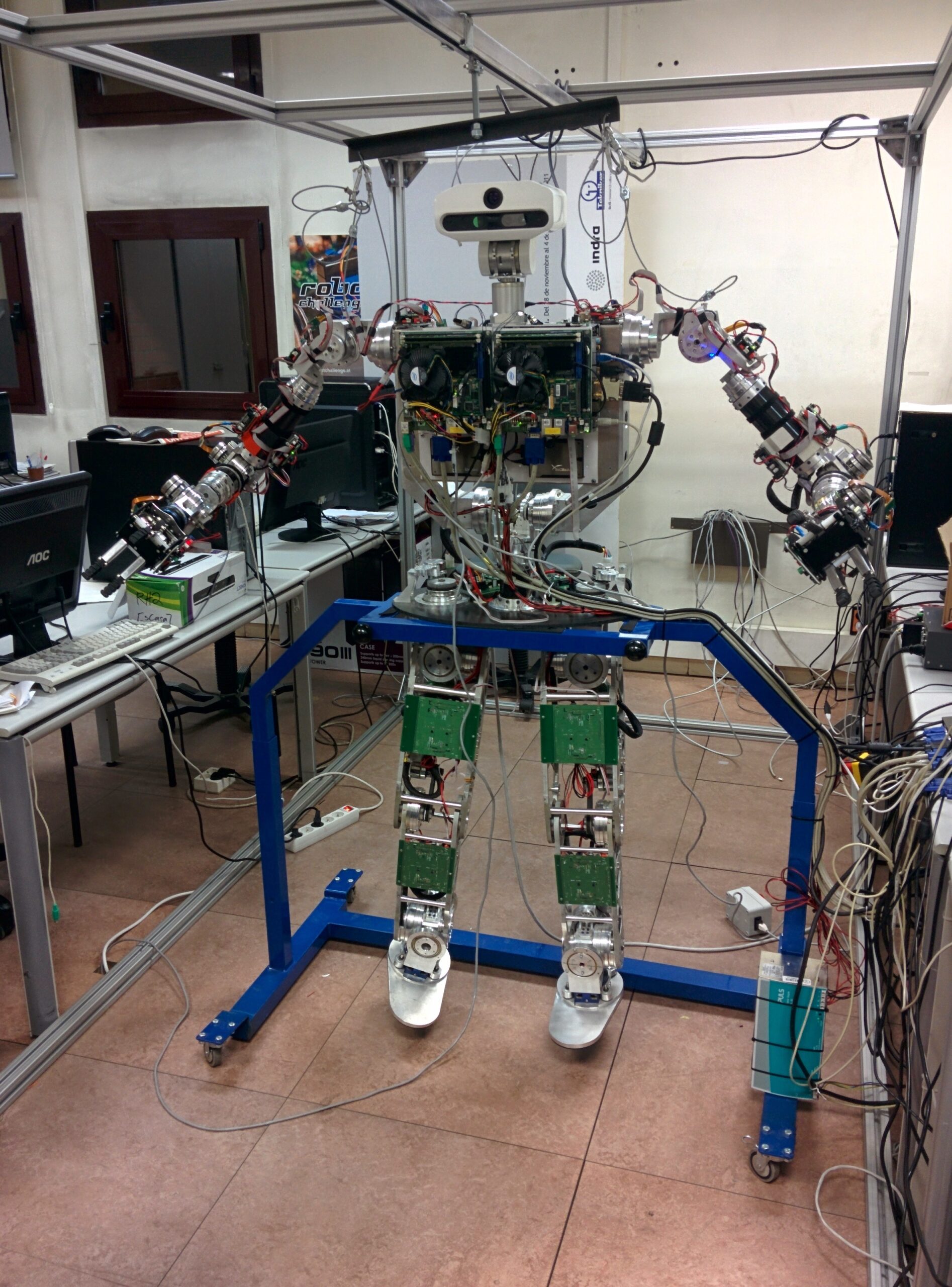
Benchmarking Humanoid Locomotion and Standing Performances during Dynamic Autonomous Bi-Manipulation of Objects
Start: 2021
End: 2023
Funder: EU Horizon2020 (FSTP EUROBENCH)
The project focusses on a whole-body humanoid robot stability during the dual standing manipulation. The robot balance with/without holding a box of unknown weight during its motion among the shelfs with slippery floor.
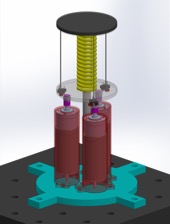
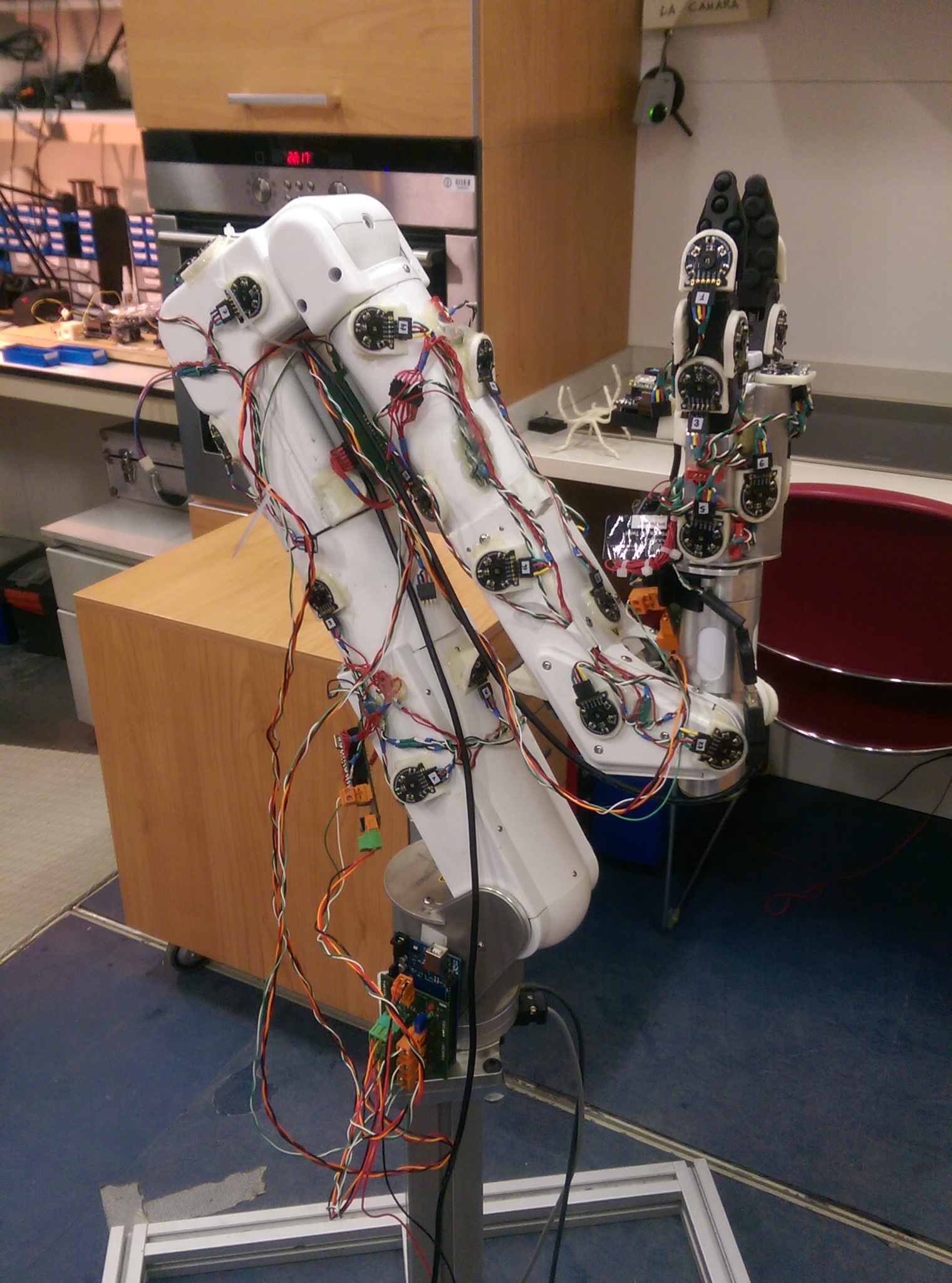
HumaSoft: Design and Control of Soft Links for Humanoid Robots
Start: 2016
End: 2019
Funder: MINECO
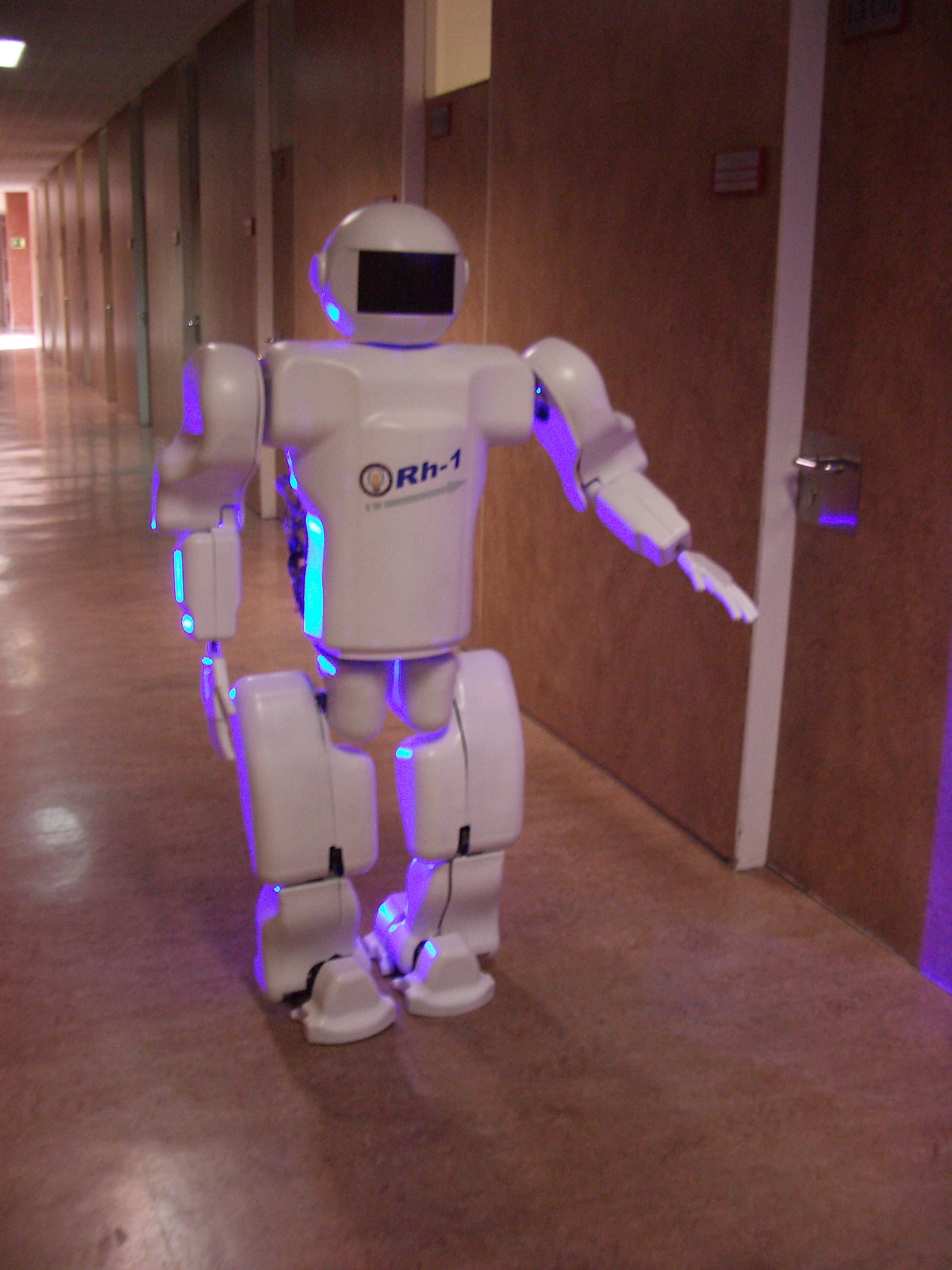
The main objective of the HUMASoft project is the development of a new type of links to create softer humanoid robots that meet the characteristics of simplicity, accessibility and safety. These soft links may be used interchangeably in various limbs of the humanoid robots, like arms, neck and spine, under the constraints of scalability, controllability of their stiffness and integration.
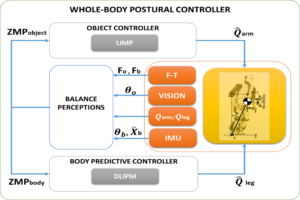
Bioinspired balance of humanoid robots for transport tasks
Start: 2021
End: 2023
Funder: EU Horizon2020 (FSTP EUROBENCH)
The aim of this proposal is to implement and improve different bioinspired balance strategies and controllers while the humanoid robot performs a special manipulation task. The behavior proposed consist of transport an object without grasping it, similar to a human waiter transporting objects on a tray. During the execution of this behavior a double balancing task
Hybrid NeuroProsthetic and NeuroRobotic Devices for Functional Compensation and Rehabilitation of Motor Disorders
Start: 2010
End: 2015
Funder: CONSOLIDER
The HYPER Project will focus its activities on new wearable neurorobotic (NR) and motor neuroprosthetic (MNP) systems that will combine biological and artificial structures in order to overcome the