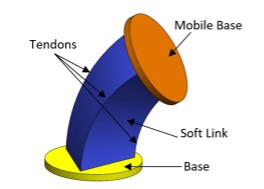
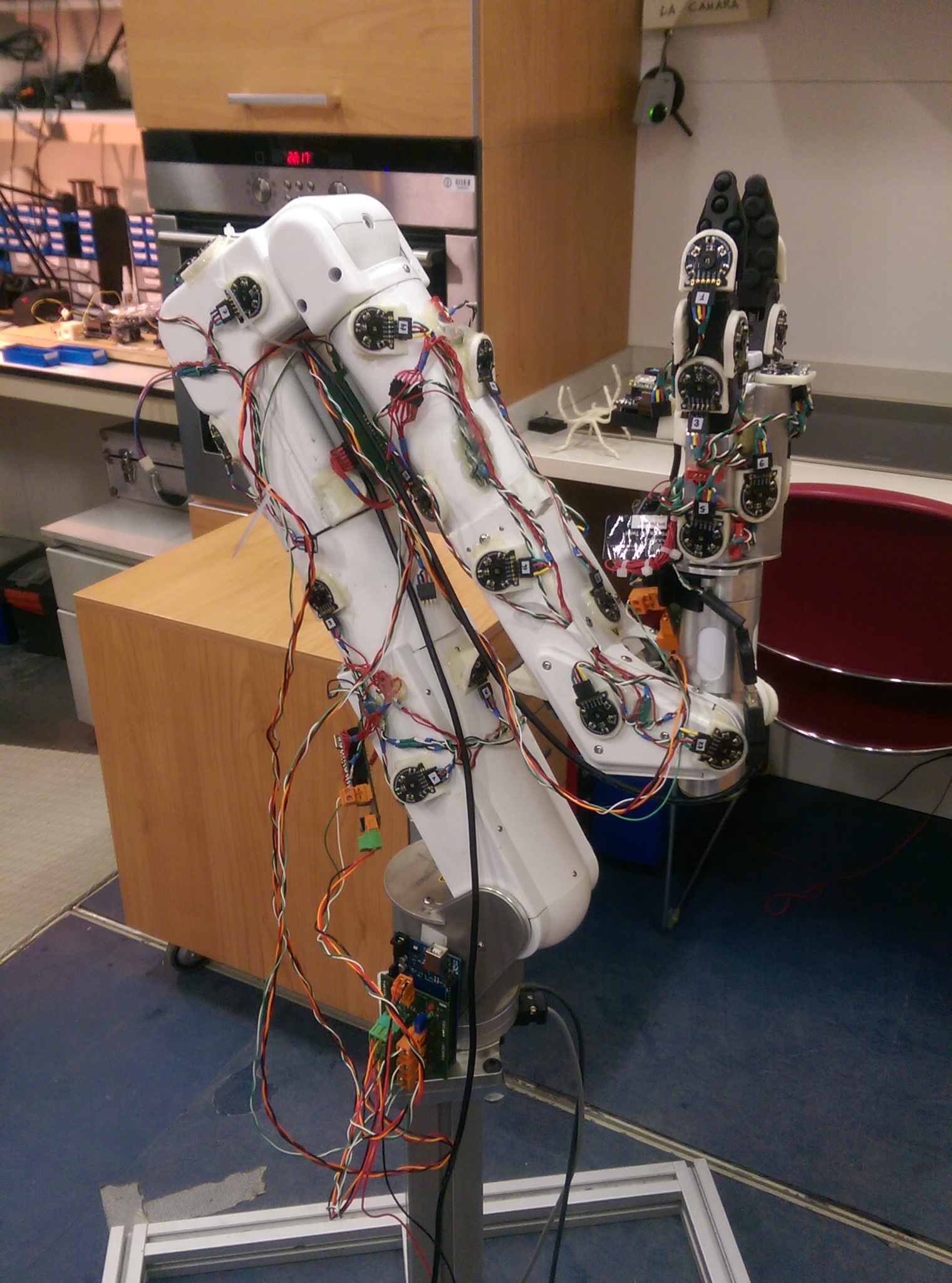
Learning and planning dexterous manipulation techniques for mobile manipulators
Start: 2011
End: 2013
Funder: CICYT
This project is focused on researching about learning techniques and manipulation of objects and the development of a set arm-hand that allows robots to get progressively closer to handling capacities offered by the arm-hand set of human beings.
Development of an object and presence detection system for automated systems in homes
Start: 2018
End: 2018
Funder: DOMO GESTORA DE VIVIENDAS, S.L.U.
Homes tend to be automated to facilitate use by the elderly and people with any type of difficulty. The project tries to implement protection systems that anticipate and anticipate possible accidents from the use of these automated systems. For this, the environment is monitored by systems based on artificial vision.
EXOESQUELETO PARA DIAGNOSTICO Y ASISTENCIA EN TAREAS DE MANIPULACION – DPI2016-75346-R
Start: 2016
End: 2020
Funder: MINISTERIO DE ECONOMÍA, INDUSTRIA Y COMPETITIVIDAD. Programa Estatal de Investigación, Desarrollo e Innovación Orientada a los Retos de la Sociedad
Hand exoskeletons based on SMA actuators for rehabilitation application
European Union – Japan R&D construction consortium
Start: 1995
End: 2007
Funder: IMS
The consortium coordinates R&D activities of the European Union and Japan in the field of construction automation, appointed by global international IMS (Intelligent Manufacturing Systems) program. Since 1995 periodical working meetings had been performed