Industrialised, Integrated, Intelligent Construction
Start: 2006
End: 2009
Funder: EU 6th Framework Programme
I3CON (6FP EU IP project under NMP priority) objective is the research in innovative & intelligent building systems by using control, automation, embedded sensing and ambient intelligence technologies by creating new predictive services over buildings.
Innovative Educational Concepts for Autonomous and Teleoperated Systems
Start: 1999
End: 2003
Funder: European Union - USA
IECAT is a tele-education project where seven universities in the United States and Europe co-operate to set up a virtual international laboratory for control experiments related to aerospace and robotics
The project addresses the crucial issue of rapidly acquiring and providing information, which is a key necessity in the effective response to a serious mining incident. Numerous new initiatives in mines rescue will be addressed, and these are expected to bring major benefits in the safety and welfare of affected miners and the mine’s ongoing operations and profitability. Multi-robot rescue
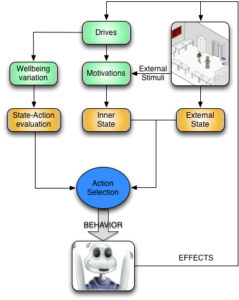
Implementation of a decision making system in the robot Maggie
Start: 2011
End: 2012
Funder: Comunidad de Madrid
This project is focused on the implementation of a bio-inspired architecture for an autonomous and social robot. This architecture is based on the original one developed by other members of the Robotics Lab: the AD (automatic/deliberative) architecture. The new version has been completed by adding a decision making system based on drives, motivations and self-learning.
Sensor-based integration of planning and interaction control in advanced mobile manipulators
Start: 2005
End: 2007
Funder: CICYT
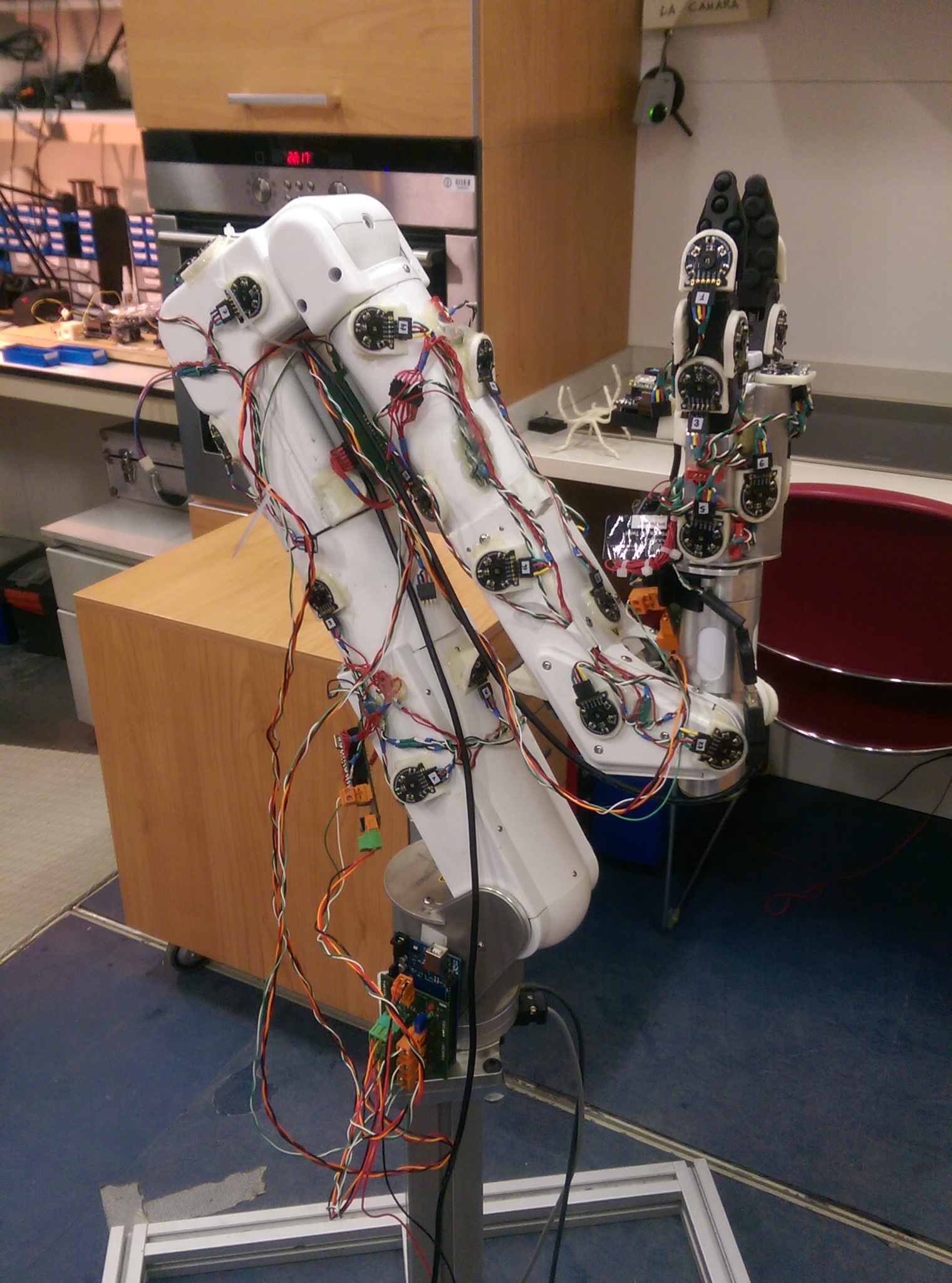
The main objective of IPCIS Project (Spanish acronym of sensor-based integration of planning and interaction control in advanced mobile manipulators) is the new capabilities development to operate into the environment for the MANFRED mobile manipulator.
The main objective of this proposal is the development of the new integrated paradigm of intelligent robotic assistant for people with different needs. Unlike the traditional industrial environments, centered in manufacturing processes, the personal assistant robots work in daily life unstructured environments and perform multiple activities that help people to live better.