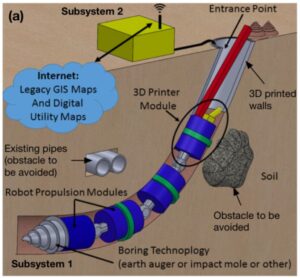
Robot for autonomous underground trenchless operations, mapping and navigation
Start: 2017
End: 2019
Funder: European Union - HORIZON 2020
The HORIZON 2020 project BADGER (Robot for Autonomous underground trenchless operations, mapping and navigation) is one of the few funded projects in the last LEIT ICT 25 2016 Call (7,4% of success). The RoboticsLab of the University Carlos III of Madrid (ES) leads the project with the following partners: University of Glasgow
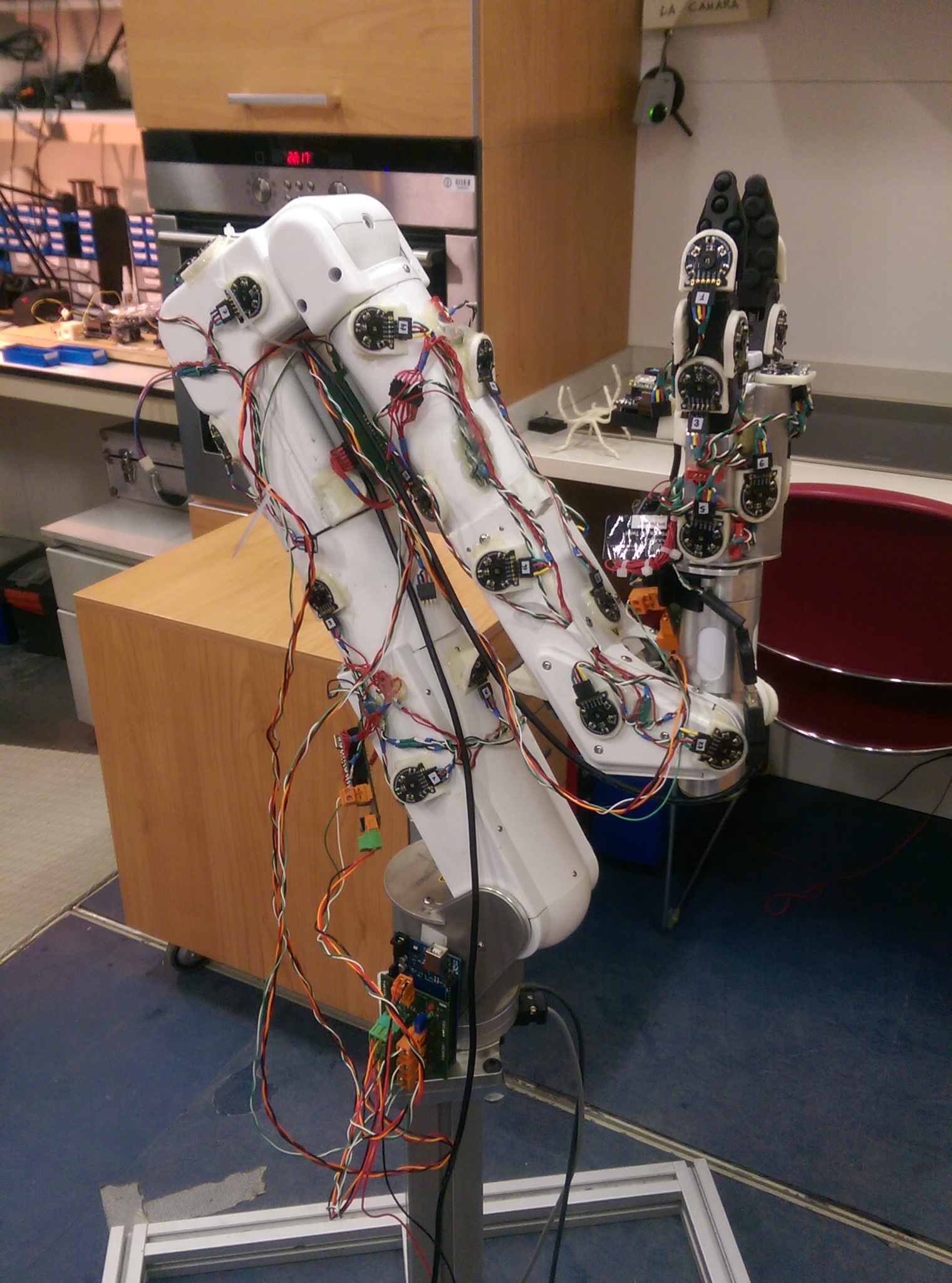
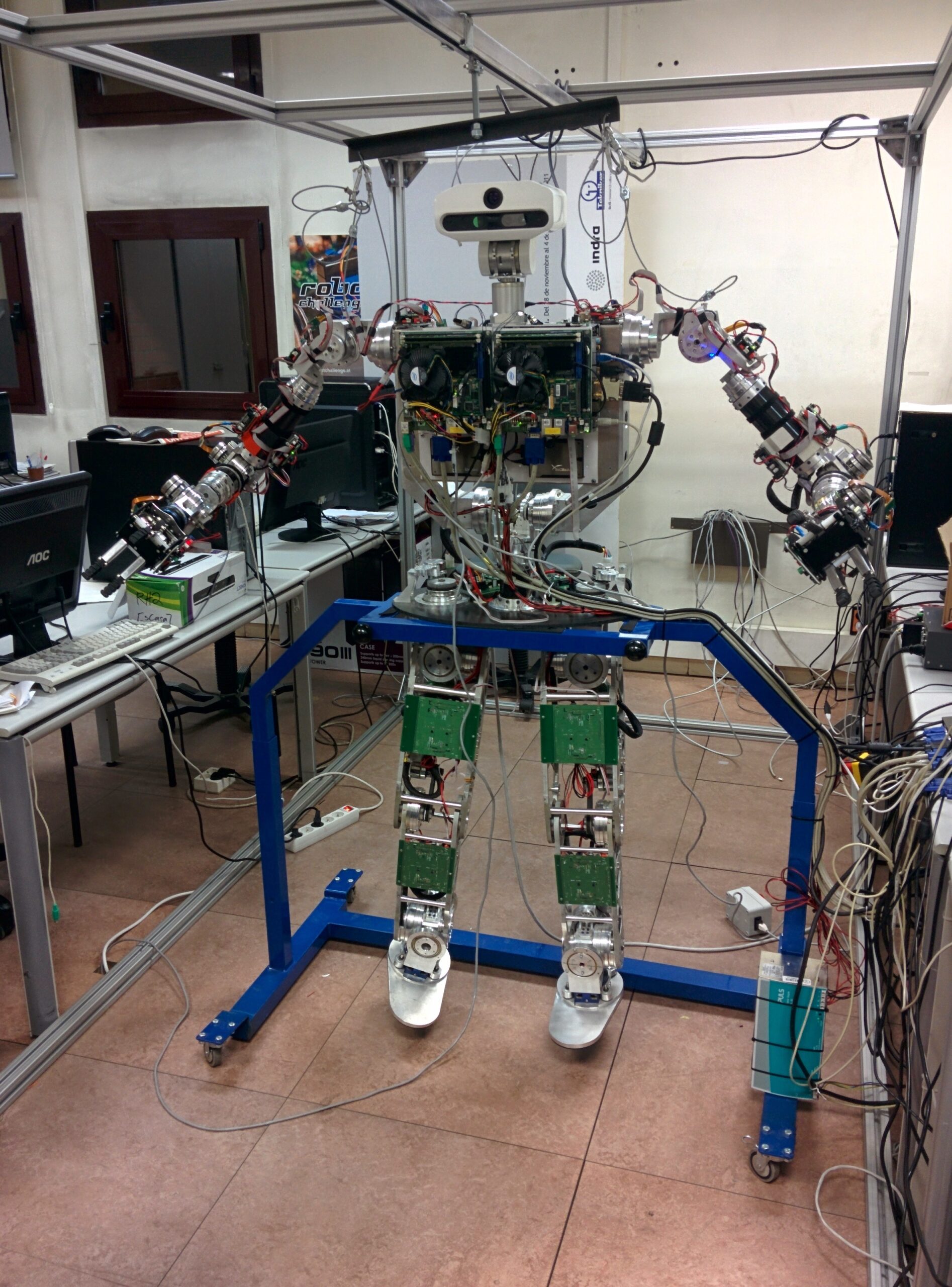
Active co-operation between humanoid robots and humans in collaborative working environments
Start: 2007
End: 2010
Funder: CICYT
The main objective of this project is to develop an advanced control system that allows co-operation tasks to be carried out semi-autonomously between full-size humanoid robots and humans in real working environments like construction in space application
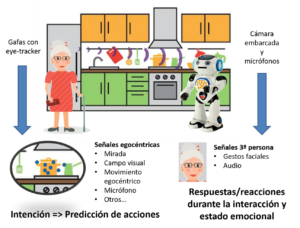
Safe and multimodal cooperation with robotic assistants for people with special needs
Start: 2011
End: 2012
Funder: Comunidad de Madrid - UC3M
A new kind of robotics empowered living facilities must provide services to cover sensory, communications and power requirements of the robotic devices operating inside. Ideally these robots can operate smartly in unstructured indoor environments.
Artificial intelligence and cognitive models for symmetrical human-robot interaction in the field of assistive robotics
Start: 2021
End: 2024
Funder: Community of Madrid
COMPANION-CM proposes the use of more socially intelligent robots in the field of assistive robotics, enhancing their interaction capabilities with patients. The project will develop a personalized training platform that will be integrated onto the TEO humanoid robot.
Discover2Walk. Development a novel robotic system that promotes walking in toddlers with CP
Start: 2020
End: 2023
Funder: Agencia Estatal de Investigación
To engineer a novel robotic system that promotes walking in toddlers. This project will follow a novel approach of lower-limb robotic system based on emerging soft actuation technologies (SMA actuators) that seamlessly interacts with toodlers and helps them discover how to walk in a natural and adaptive way.