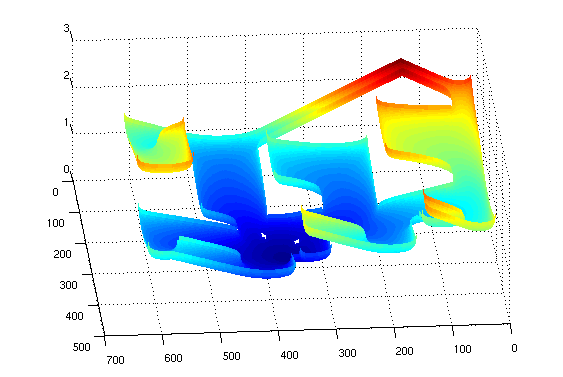
Fast Marching
The Fast Marching algorithm is very similar to the Dijkstra algorithm that finds the shortest paths on graphs, though it

The Fast Marching algorithm is very similar to the Dijkstra algorithm that finds the shortest paths on graphs, though it
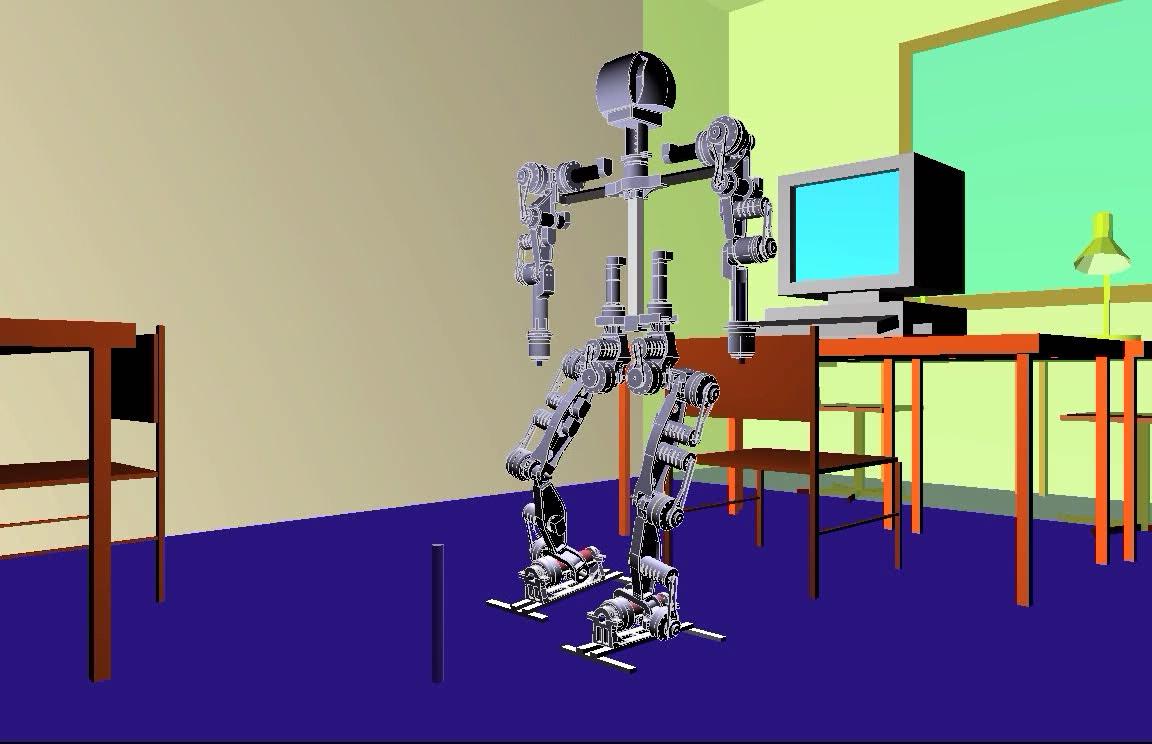
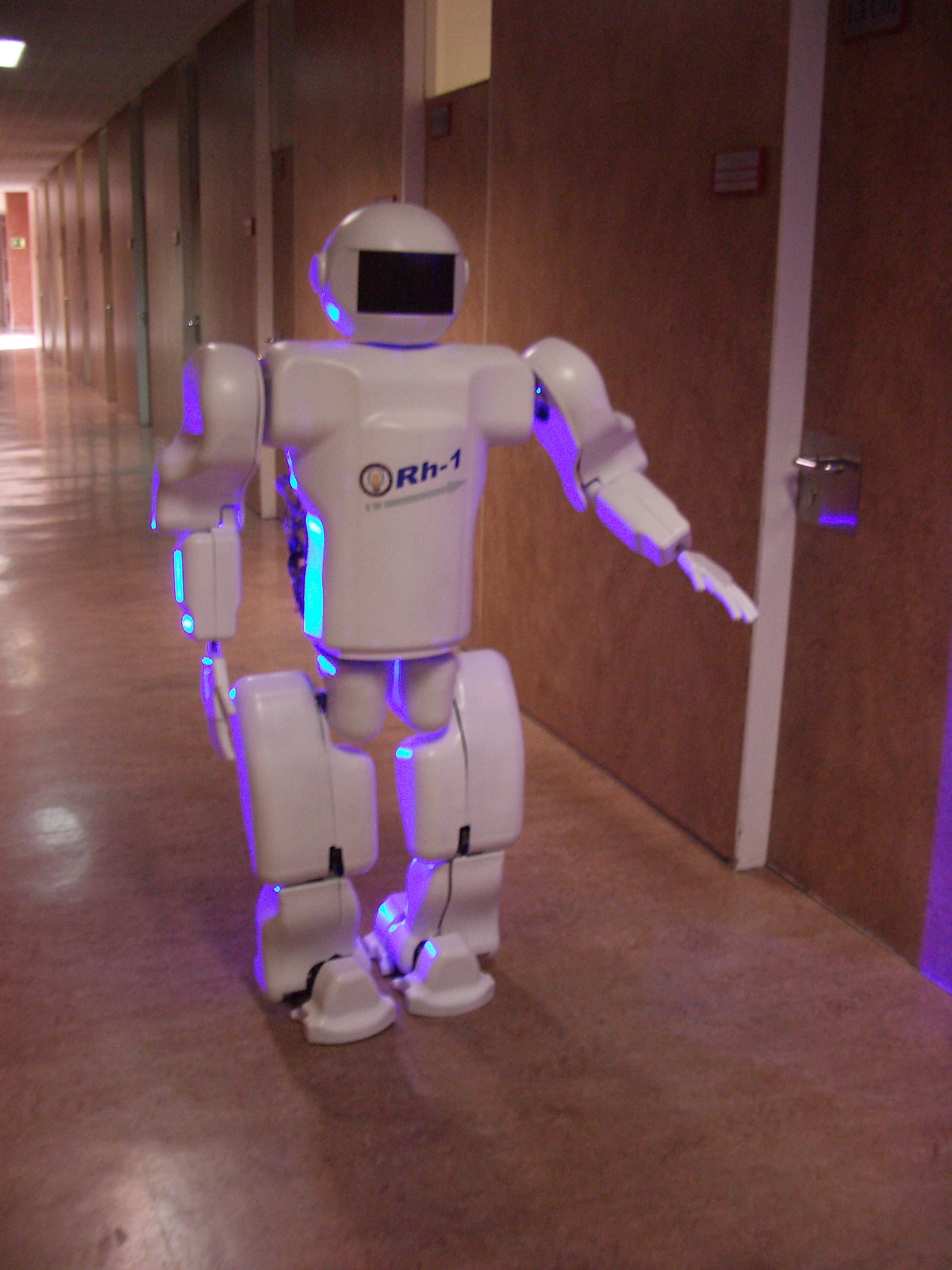
The research in stable walking of humanoid robots is in general non-solved problem. Our research deals with the implementation of
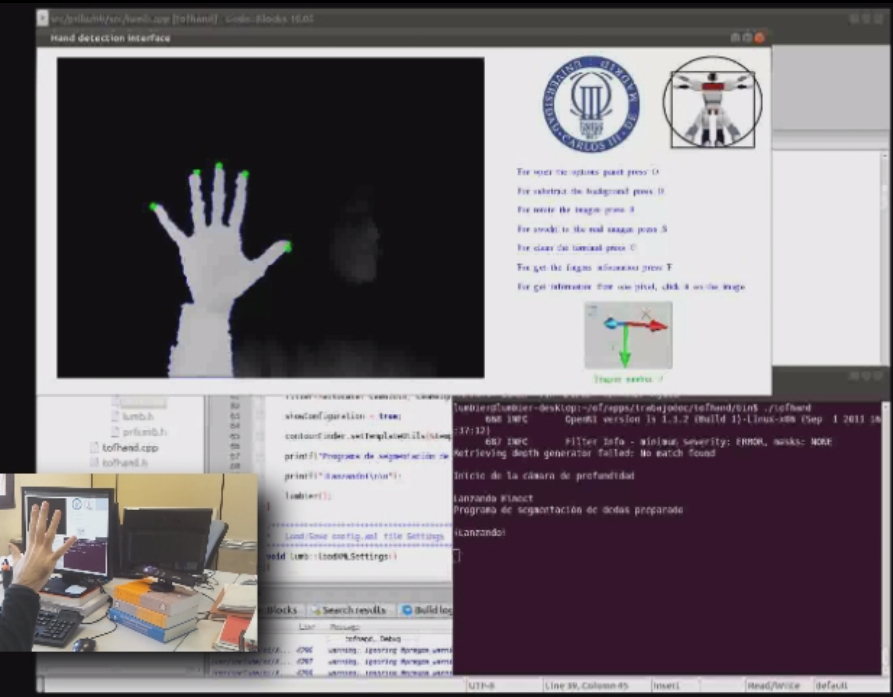
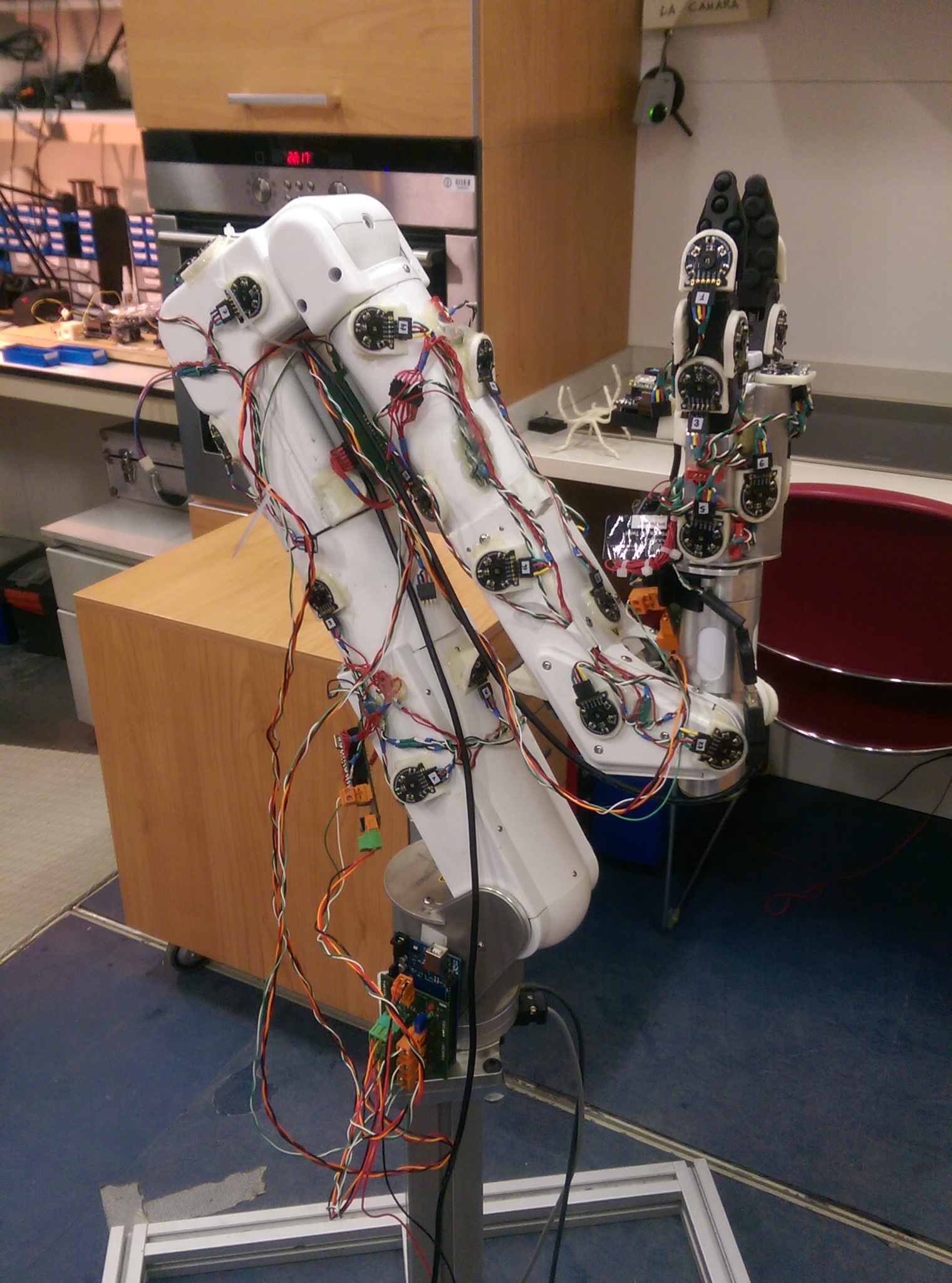
The main objective of this research area is learning how to identify the hand to manipulate objects without human interaction.
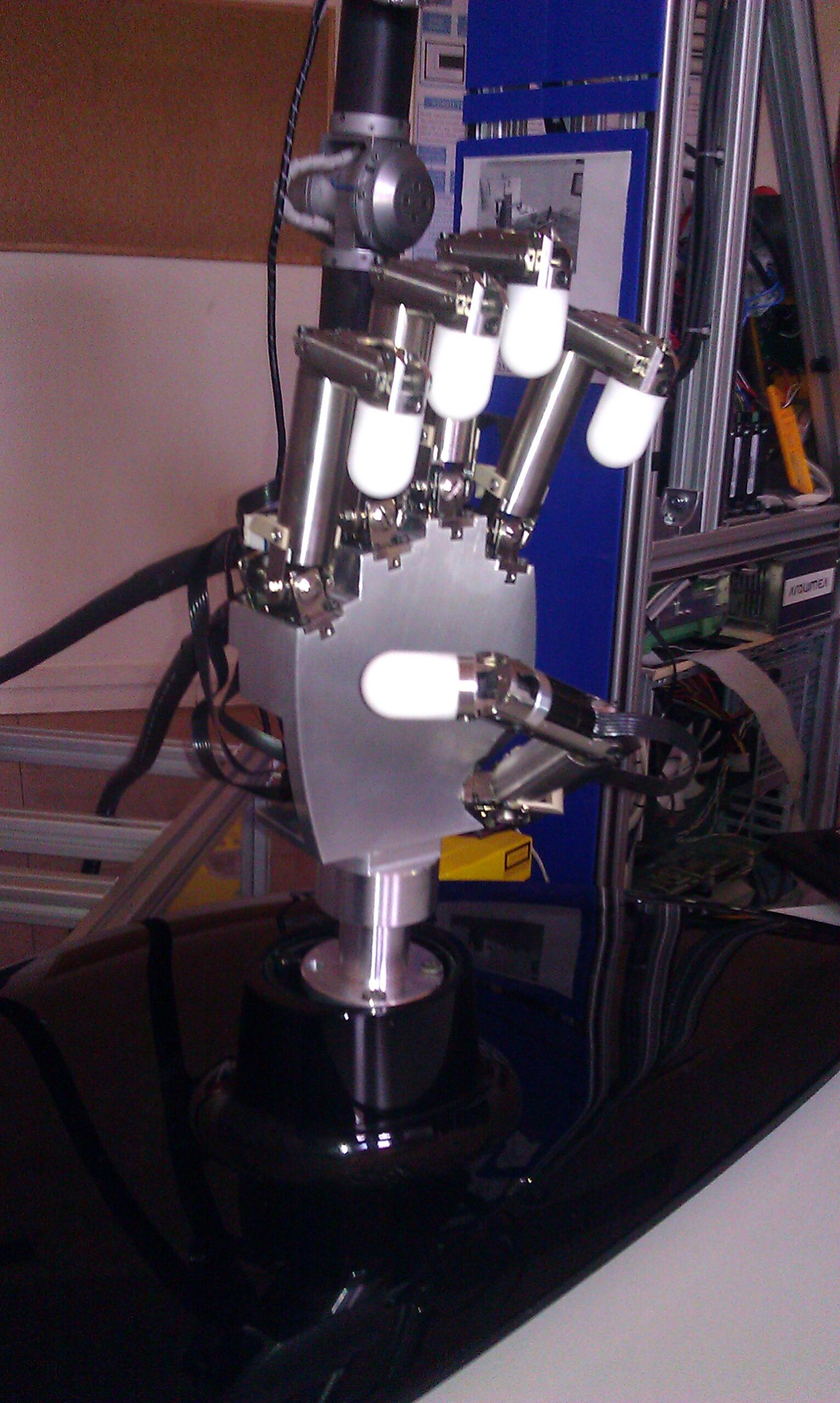
The main objective of this research area is the development of manipulation abilities for the Gifu Hand III, including grasping
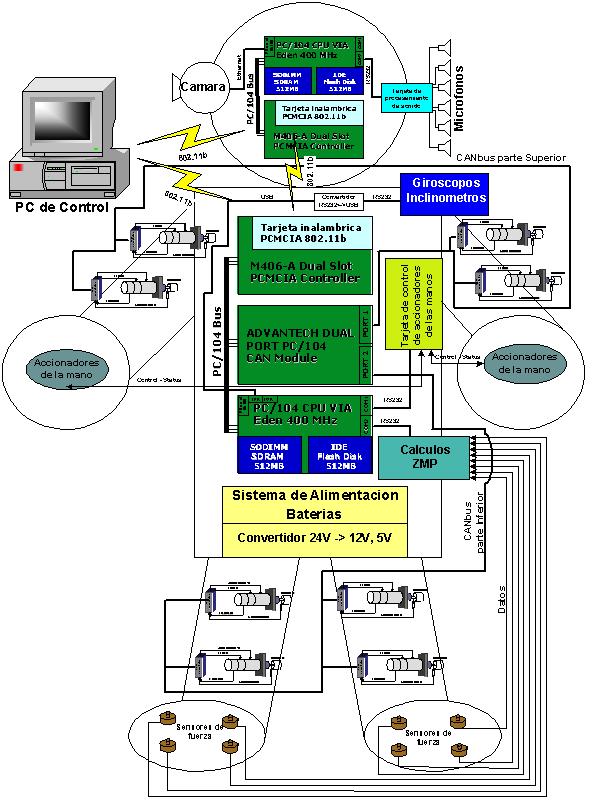
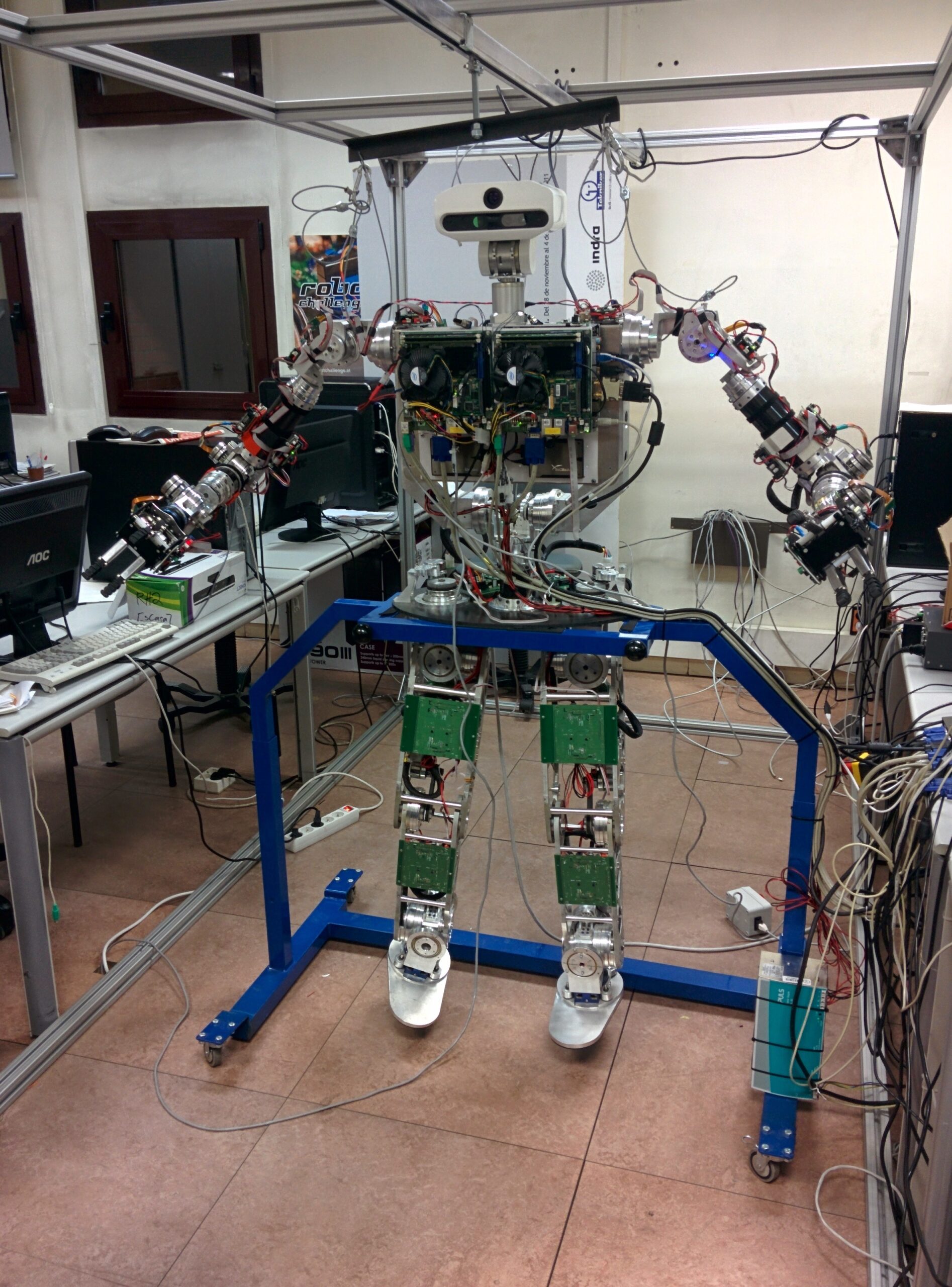
Humanoid robot is complex system that must be carefully designed. Development of a hardware architecture is the first step to

La interacción humano robot basada en diálogos es un campo de investigación amplio, entre los que se incluyen la interacción

This research area deals with the development of a robotic head for the robot Rh-1. The head will be equipped

The humanoid robot bipedal locomotion requires computationally advanced and efficient algorithms to solve both, the global navigation with obstacle avoidance
RoboticsLab is located at Leganes Campus of the Carlos III University of Madrid, about 10 kilometers south of central Madrid. Our offices are at the third floor of the Agustin de Betancourt building (marked 1 in the map).