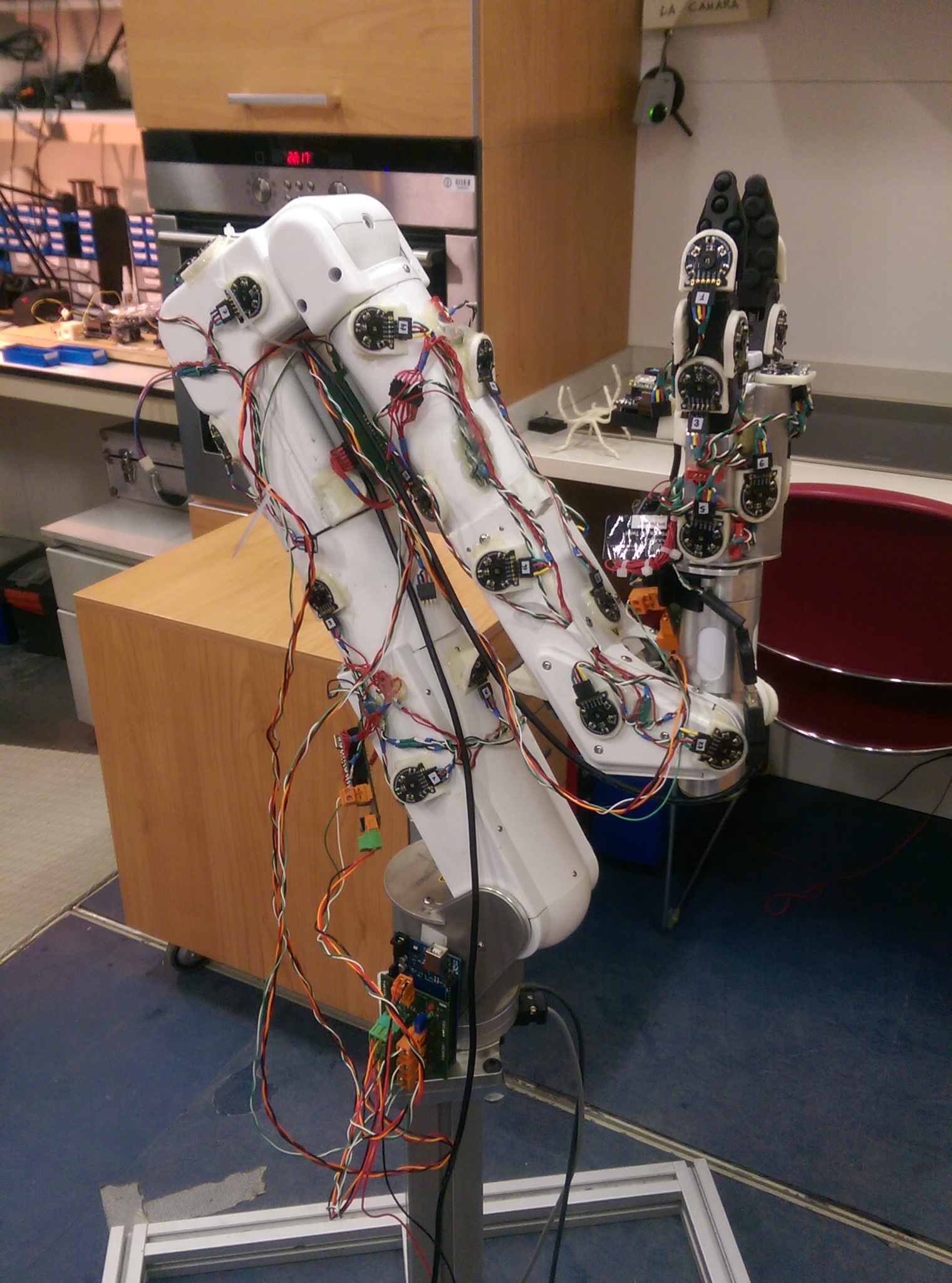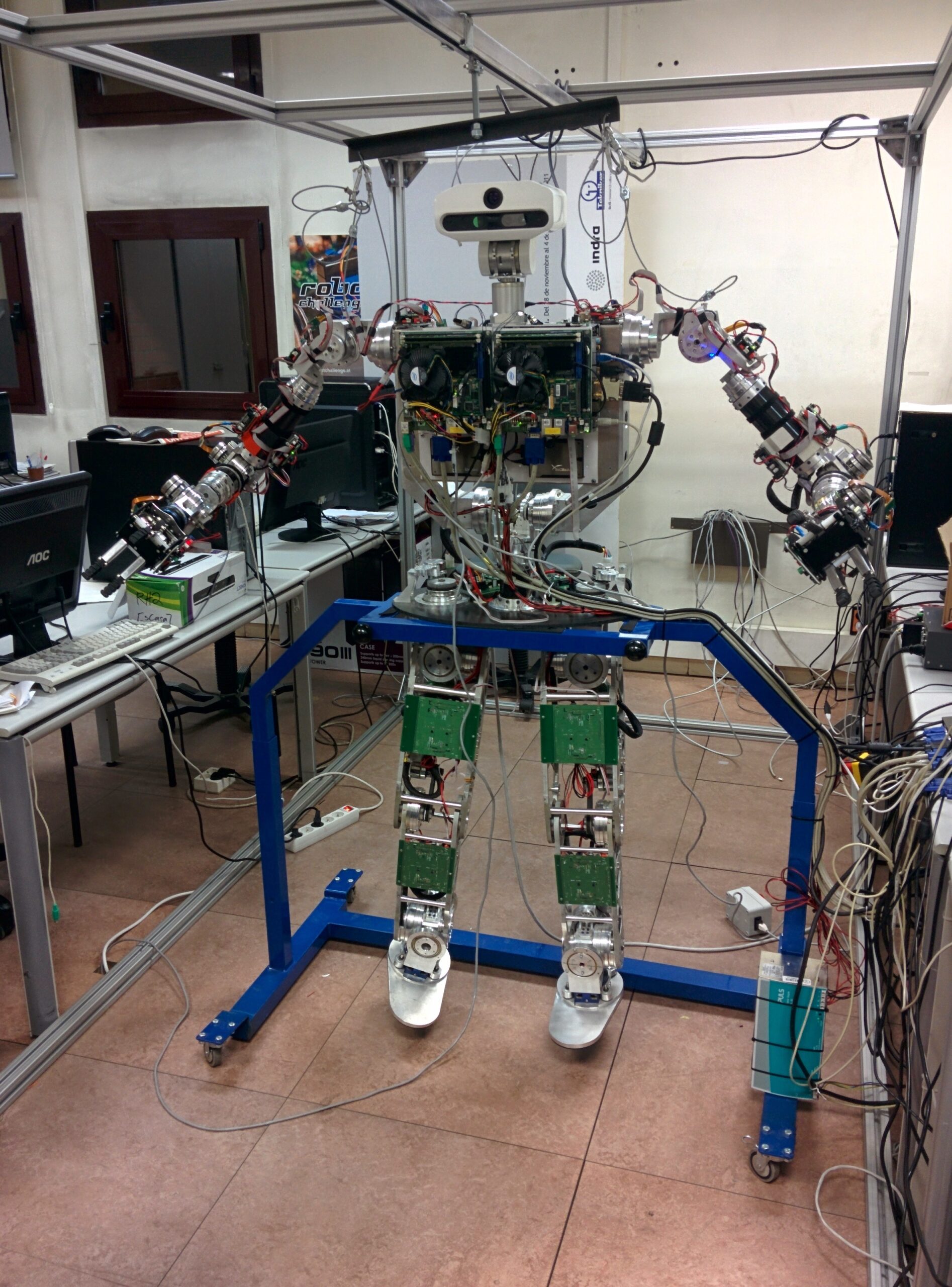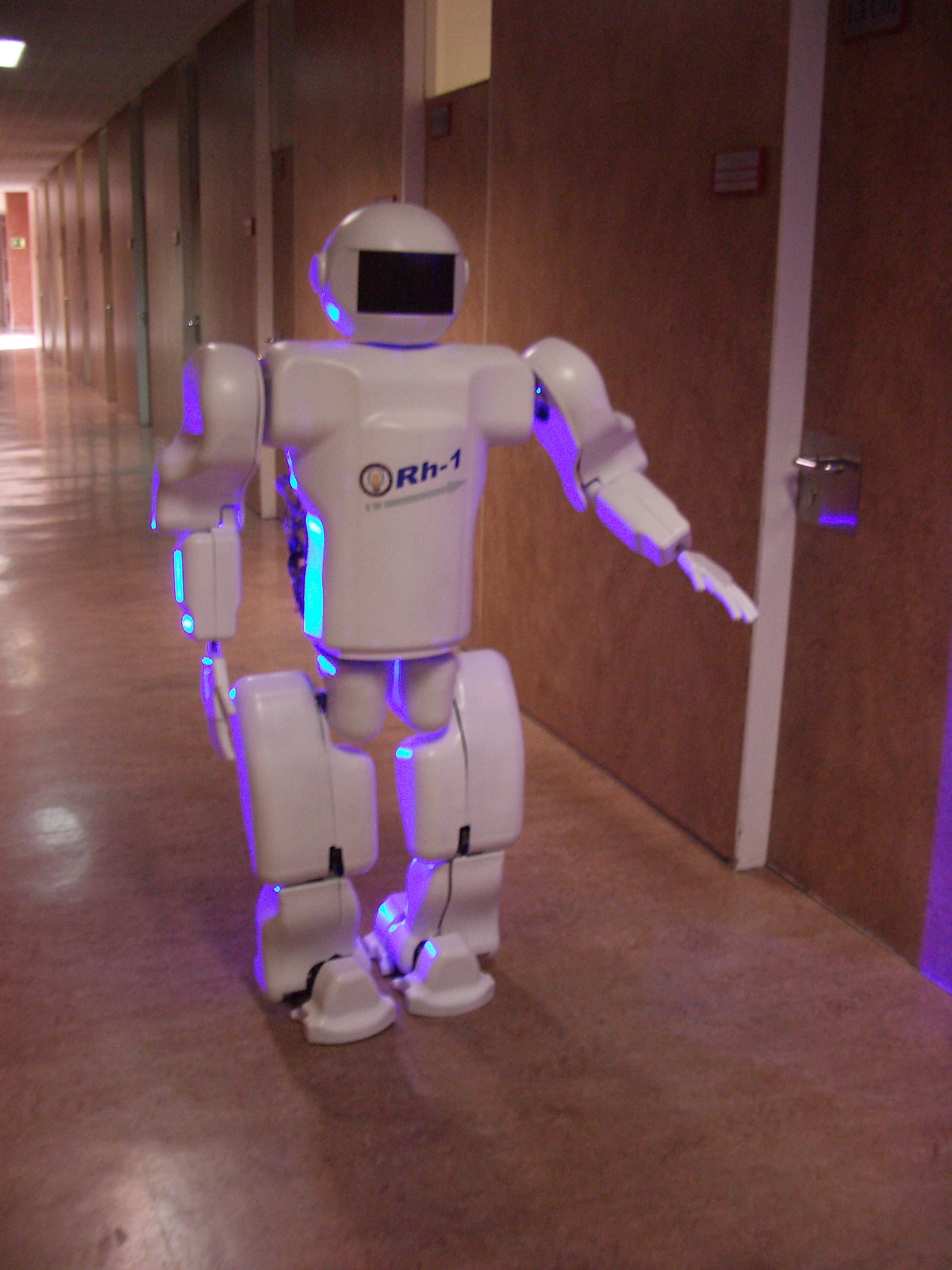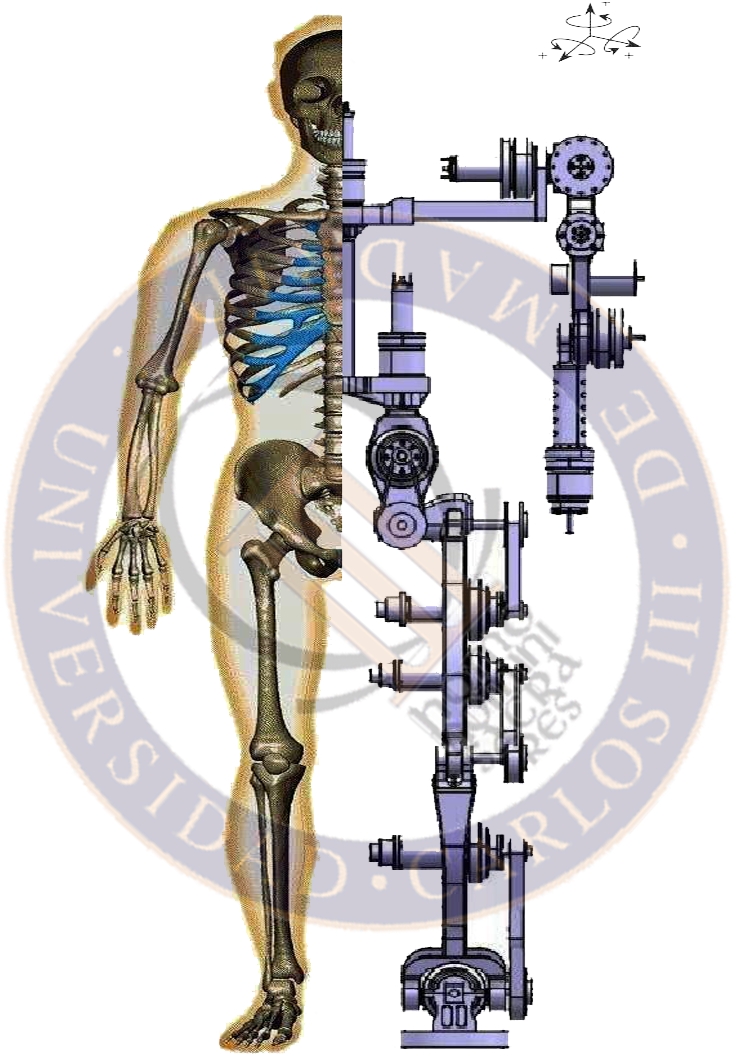
Kinematic & dynamic design of humanoids
This research area deals with the development of a kinematic and dynamic design of humanoids robots

This research area deals with the development of a kinematic and dynamic design of humanoids robots
The main objective ofthis project is to design a decision making system, based onemotions and using unsupervised learning, for an

We have developed an Autonomous Personal Robot, Maggie, that is going to interact with the user in a Peer-To-Peer way.
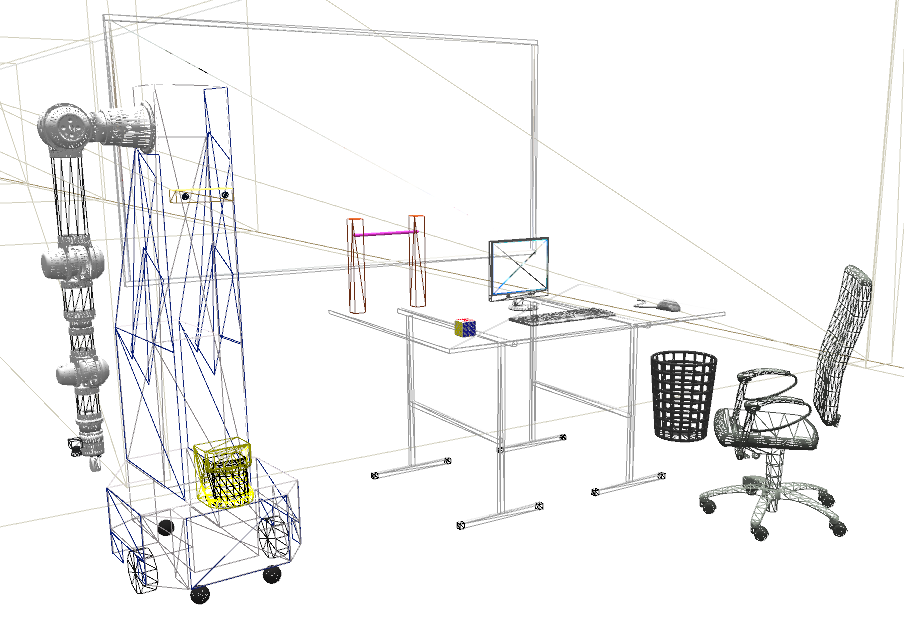
Advanced object recognition techniques are explored to improve Human-Robot Interaction and to enhance robots’ capabilities (manipulation, path planinmg, etc.)
The objective of this research line is to investigate the different postural sequencesthat a robot must follow to perform high

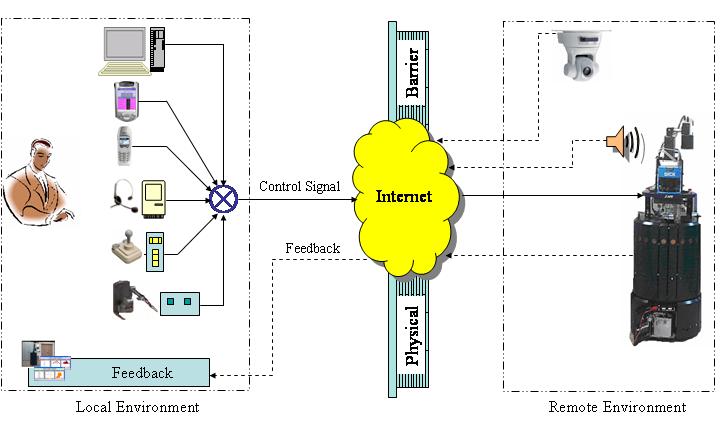
Remote interaction is a special type of human-robot interaction, where the human and the robot are separated by physical barriers
Take a look at most machine learning algorithms, when trying to get something novel, you’ll most probably get an average
RoboticsLab is located at Leganes Campus of the Carlos III University of Madrid, about 10 kilometers south of central Madrid. Our offices are at the third floor of the Agustin de Betancourt building (marked 1 in the map).