Analysis of the results of neural networks trained for the detection of defects in plastic plates for packaging
Start: 2019
End: 2020
Funder: CARTONPLAST IBERICA S.L.
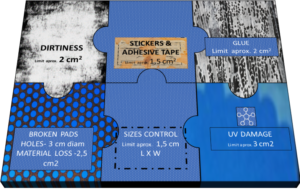
Analysis of the results of neural networks trained for the detection of defects in plastic plates for packaging. It is about carrying out the supervision and validation of a learning system for defects in plastic sheets intended for packaging. Both algorithms based on artificial intelligence and classical vision algorithms are analyzed.
Systems for the detection of explosives in centers and public infrastructures
Start: 2008
End: 2011
Funder: CENIT
SEDUCE is a CENIT project of the scope of the security in public infrastructures of transport in which the RoboticsLab participates through a sub-contracting agreement with the Arquimea company.
Artificial Intelligence and Cognitive Models for Symmetric Human Robot Interaction
Start: 2020
End: 2021
Funder: CM-UC3M
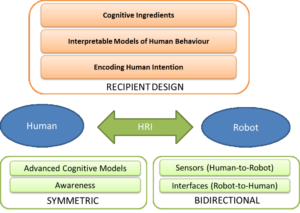
SHARON aims to develop human-centric Artificial Intelligence (AI) models, driven by principles from cognitive sciences and explainable, to enable symmetric and bidirectional interaction between humans and robots (physical AIs).
Integrated system of assisted mechatronic design for oriented computer to automatic optimising of structure of service robots
Start: 2003
End: 2006
Funder: CYCIT
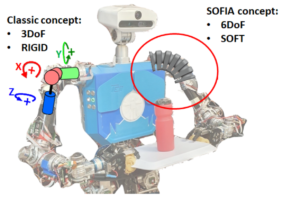
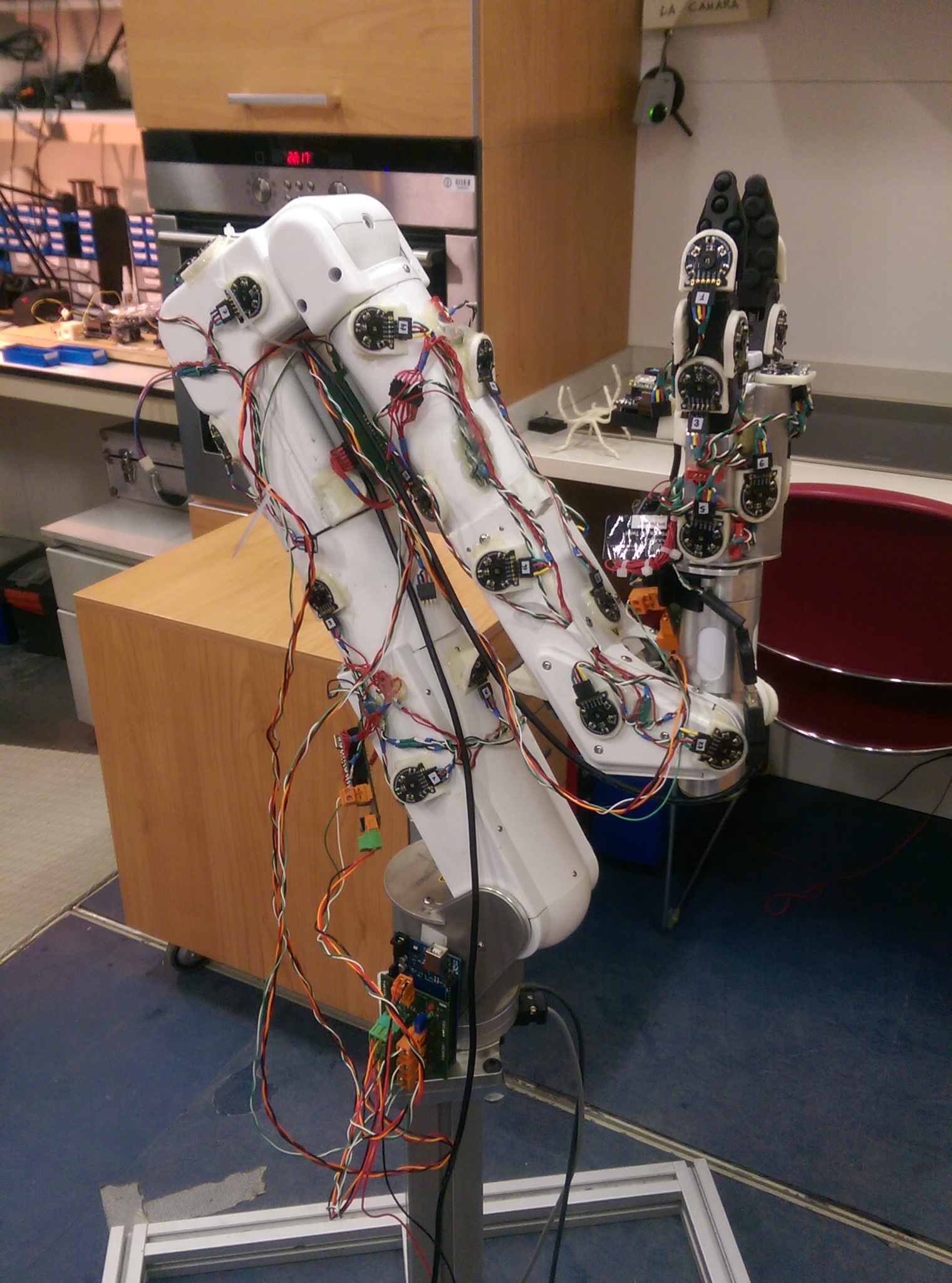
The main objective of this project is the development of a system that automates the service robot design process, (non available in the market). The design will be from different points of view: electro-mechanical, control and structural.