The goal of this project is to develop personal robots, that could act as pets and as domestic assistants. Some of the research areas are: oral communication, human-machine interfaces based on emotional behaviours and visual object recognition.
PRESSMATIC is a project thataimsto createa portableelectromechanical devicethat is able toassist peoplewhosemanual dexterityhasbeenimpairedfor any reason(illness,amputation, paralysis, etc.),automaticallyperformingthe
Technologies for comprehensive fight against forest fires and for the conservation of our forests
Start: 2010
End: 2014
Funder: EXPACE ON BOARD SYSTEMS, S.L.
PROMETEO (Technologies for comprehensive fight against forest fires and for the conservation of our forests) is a project partially supported by the Spanish Centre for Industrial Technological Development (CDTI), through the Spanish CENIT2010 Program. This project’s high interest has allowed it to be qualified as “CENIT 2010 Strategic National Consortium of Technical Research”. UC3M is participating in this project as
The PSA Peugeot Citröen collaboration goal is focused on two lines: teaching duties and a general technical support. Nowdays, colaboration is especified in the project Analyse d'Aspect Automatique, consisting of an automatic classifier of defects.
The goal of this project is to develop personal social robots with a high degree of autonomy. The robot?s behaviour will be based on their own impulses and motivations.
Autonomous and intelligent humanoid robot for industrial and service applications
Start: 2002
End: 2004
Funder: CICYT
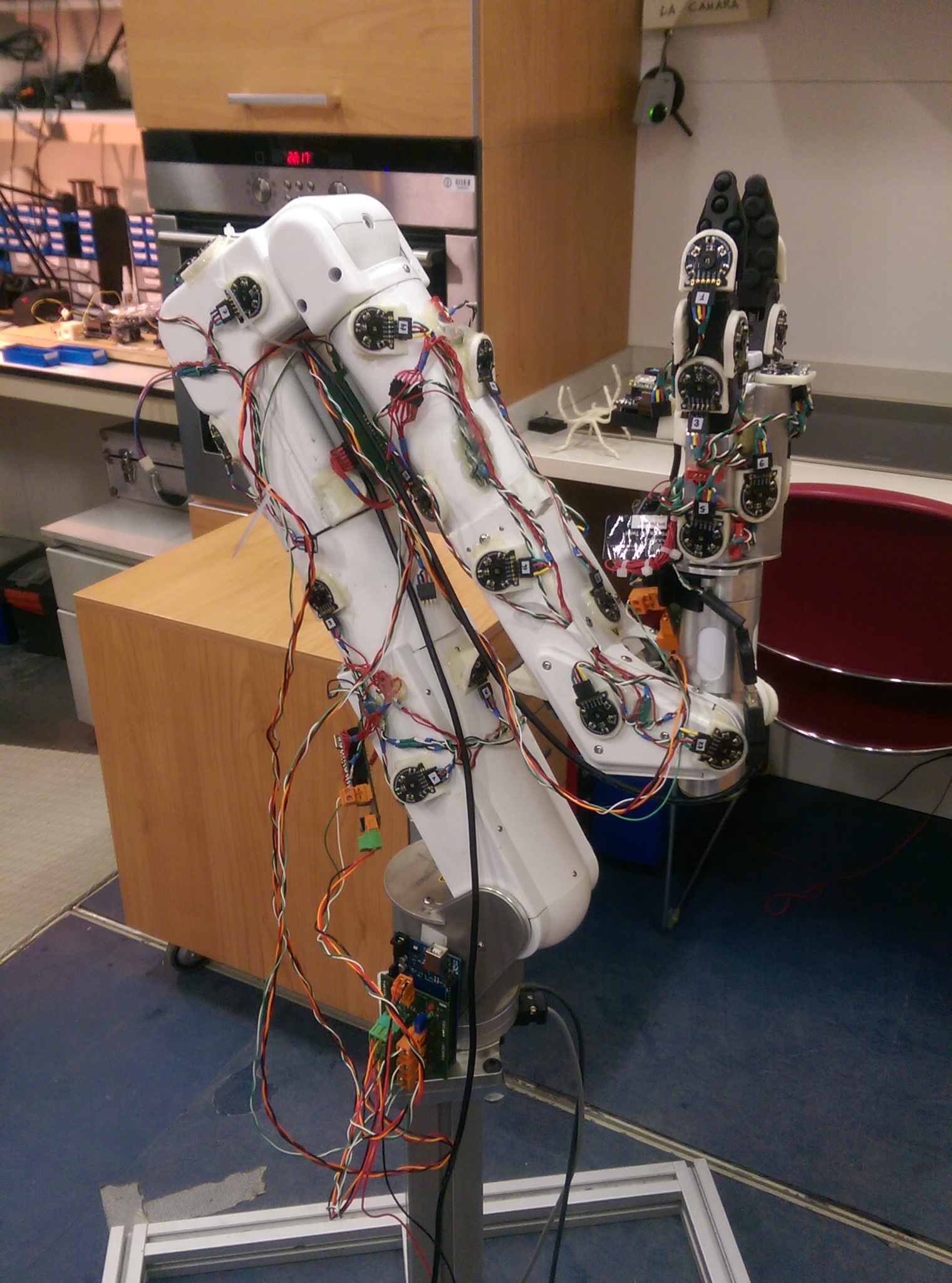
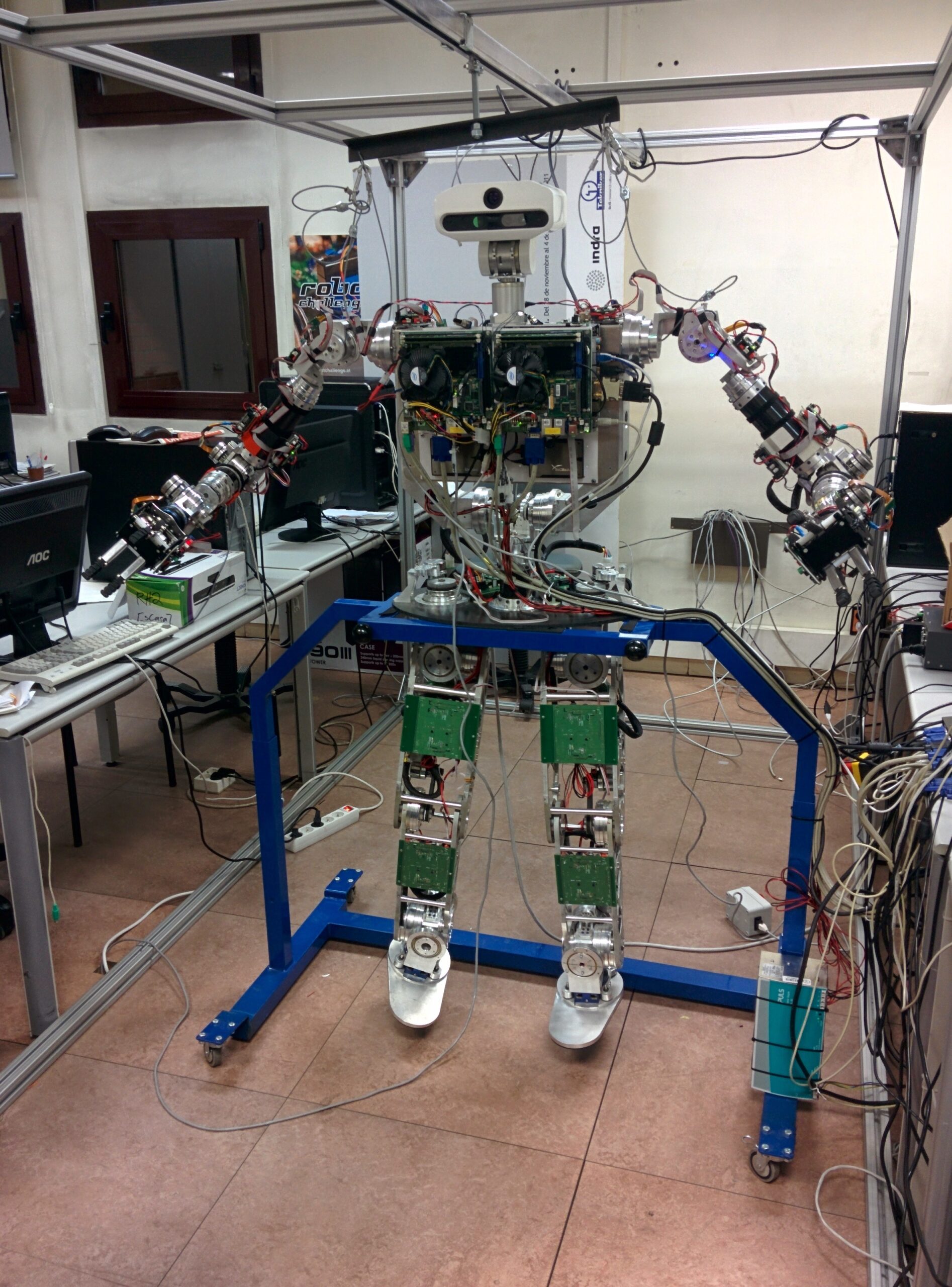
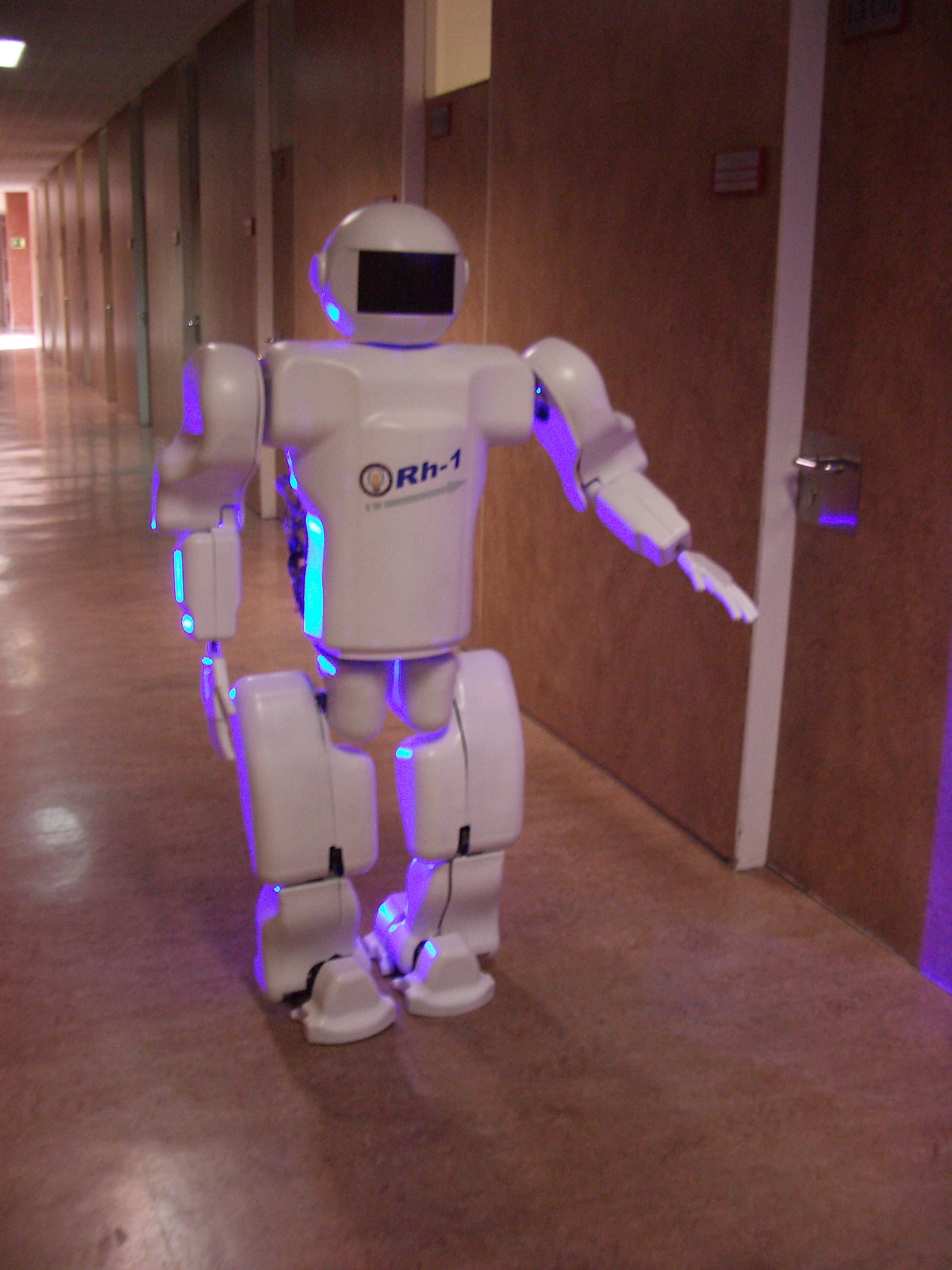
The main objective of this project is the development of 21 DOF humanoid robot of real size (1.3 m height). The robot is equipped with on-board CanBus-based control system and two batteries? packs. Rh-0 is able to stable walk in flat in-door environment.
![IMG_5724[1]](https://roboticslab.uc3m.es/wp-content/uploads/2016/02/IMG_57241-300x225.jpg)