Funder: SECRETARÍA DE ESTADO DE DIGITALIZACIÓN E INTELIGENCIA ARTIFICIAL - NextGenerationEU
Mobility Data Space The MovEDIHub project aims to develop a data space demonstrator in the mobility sector, supported by an ecosystem of both technological and specialised agents in the field of mobility, within the framework of a long-term digitalisation project such as EDIH. The foundation of MovEDIHub is to create a community of companies interested […]
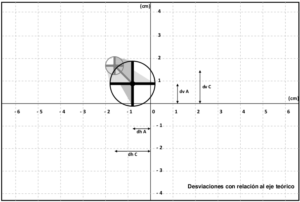
Advanced ranged navigation system for microtunnelling boring machines
Start: 2009
End: 2011
Funder: Eurohinca S.A.
An extended-range navigation system for microtunnelling boring machines is being developed upon the directives of the client in order to improve the overall process.
Extending cognitive and sematic capabilities to outdoor robot navigation
Start: 2015
End: 2017
Funder: MINECO
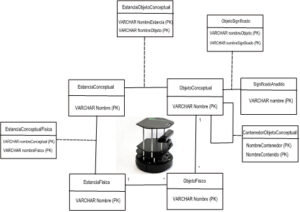
This project´s general objective is to make progress in the field of the Semantic Navigation of mobile robots. This level increases the level of autonomy of the robot, providing it with greater decision making ability and it makes easier the integration of the robot with humans and their environments.
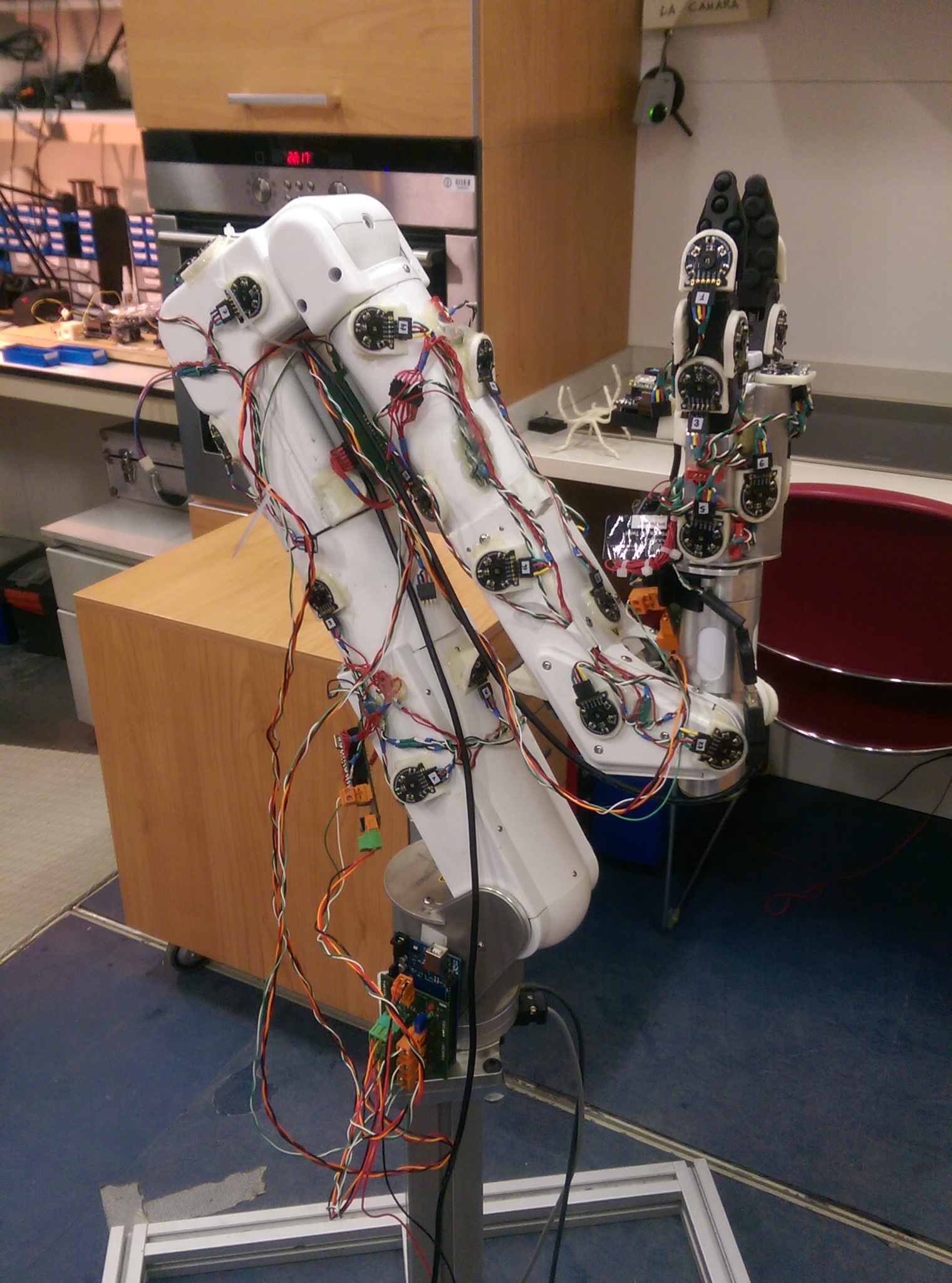
Automatic grasping of piled parts from unstructured container
Start: 2014
End: 2016
Funder: Ministry of Economy and Competitiveness (RTC-2014-3070-5)
The PAPREC project, coordinated by Ixion Industry and Aeropace SL, intends to develop an integrated system that allows industrial robots to identify and grasp parts and objects from a container and manipulate them according to the industrial process in hand.
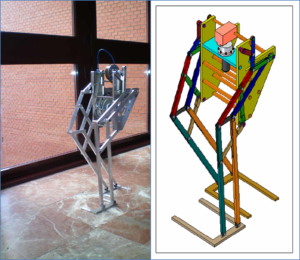
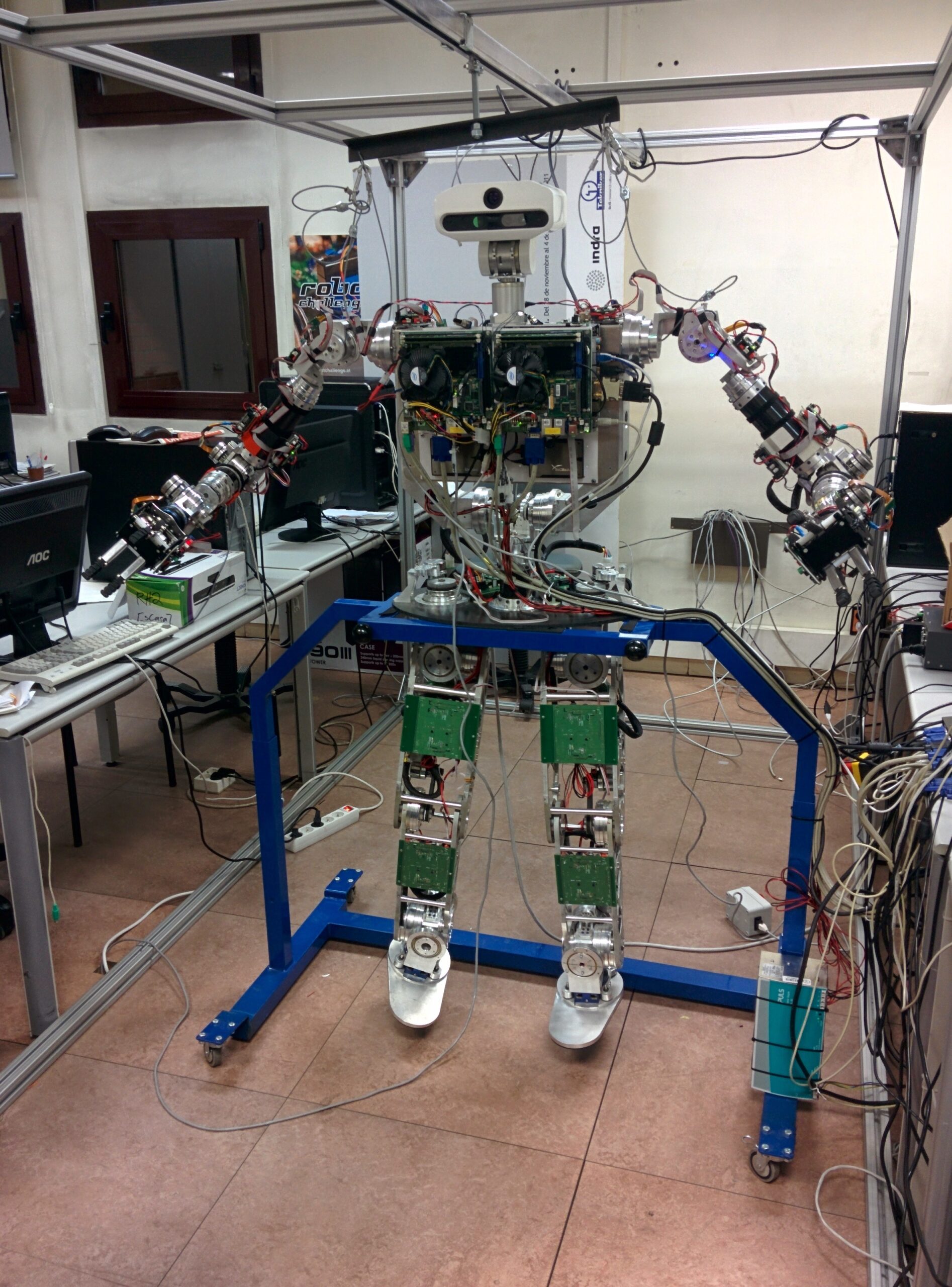
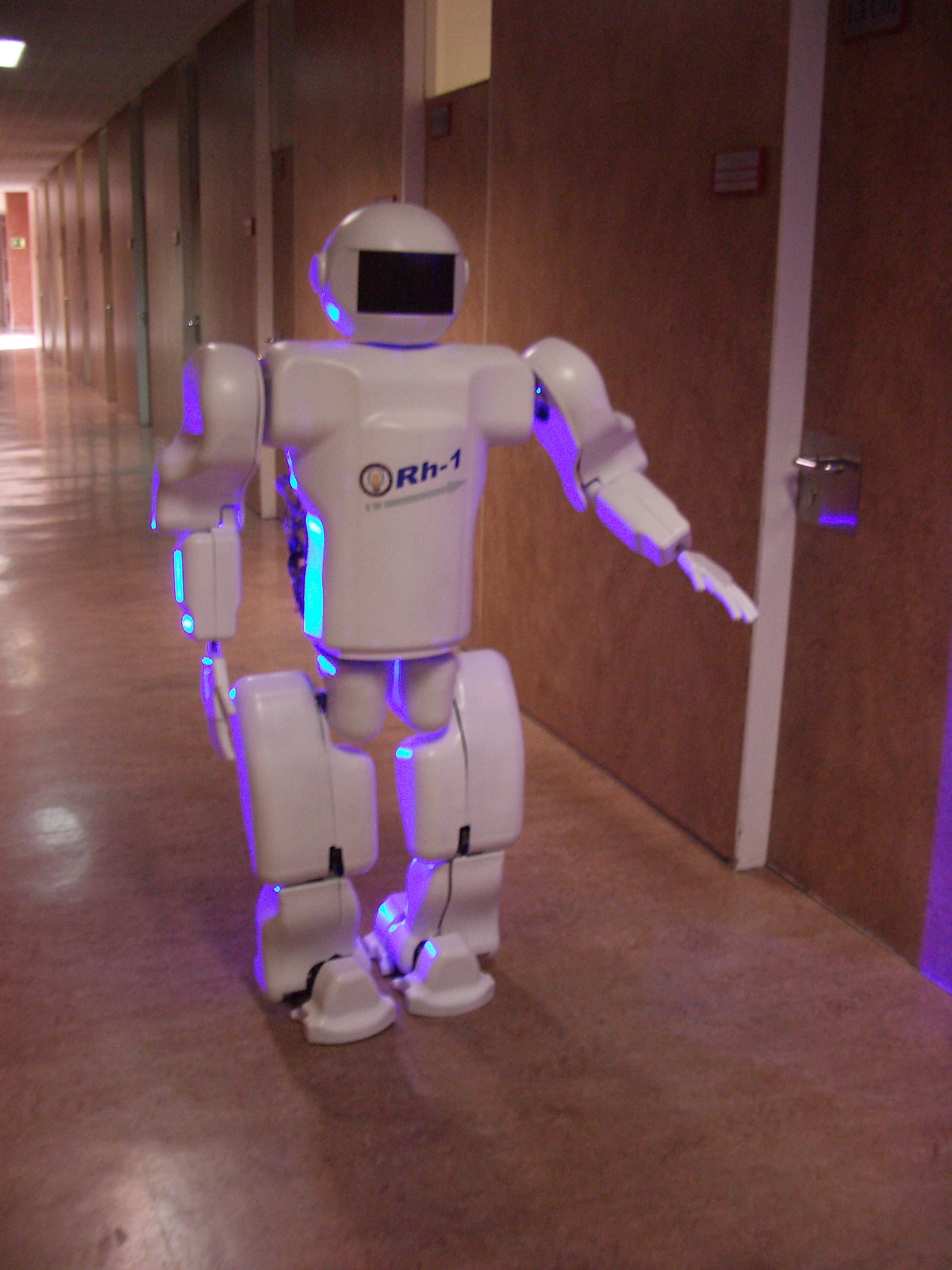
Design and control of a biped robot using passive control techniques
Start: 2006
End: 2008
Funder: CICYT
The objective of this project is the development a natural size biped robot as light as possible and with a few number of degrees of freedom. Existing humanoid robots have a high number of degrees of freedom that in most cases makes having a high weight on the legs due to the weight of the corresponding motors and actuators .
Coherent path planning and evolutive adaptation of tasks in mobile manipulators
Start: 2007
End: 2010
Funder: CICYT
The first aim of this project is to develop coherent planning techniques able to unify in a single module the trajectory planning activity by using simultaneously all available information at the robot, the global environment map and the sensory data.