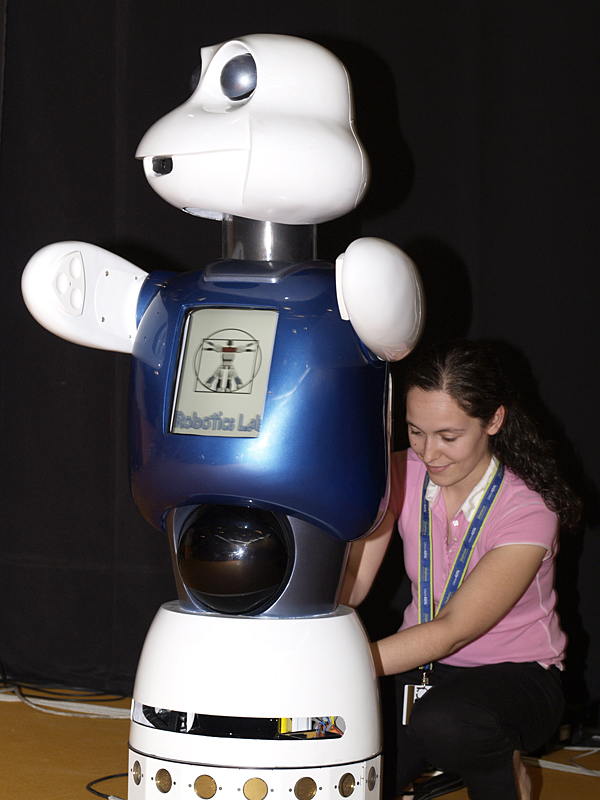
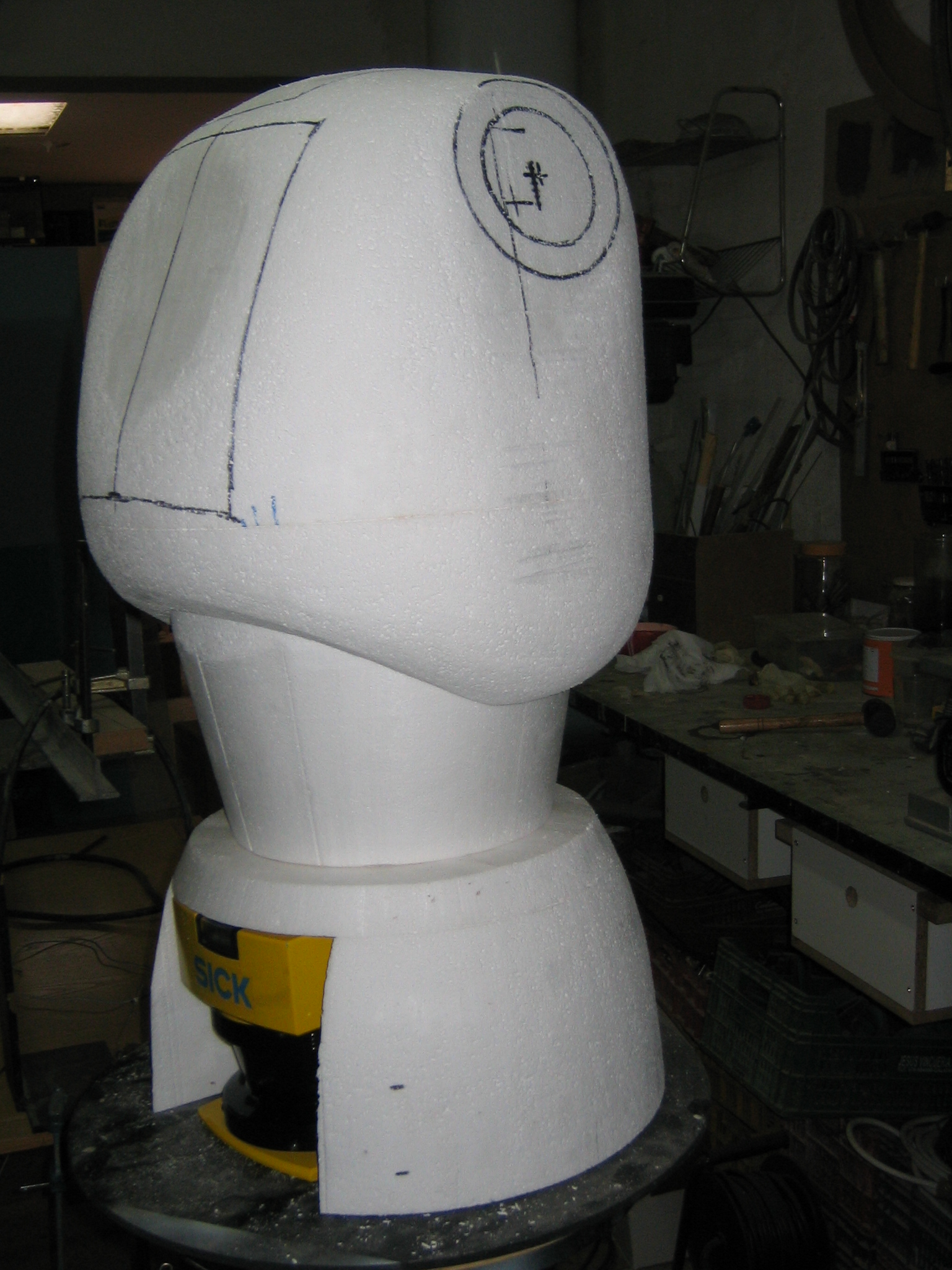
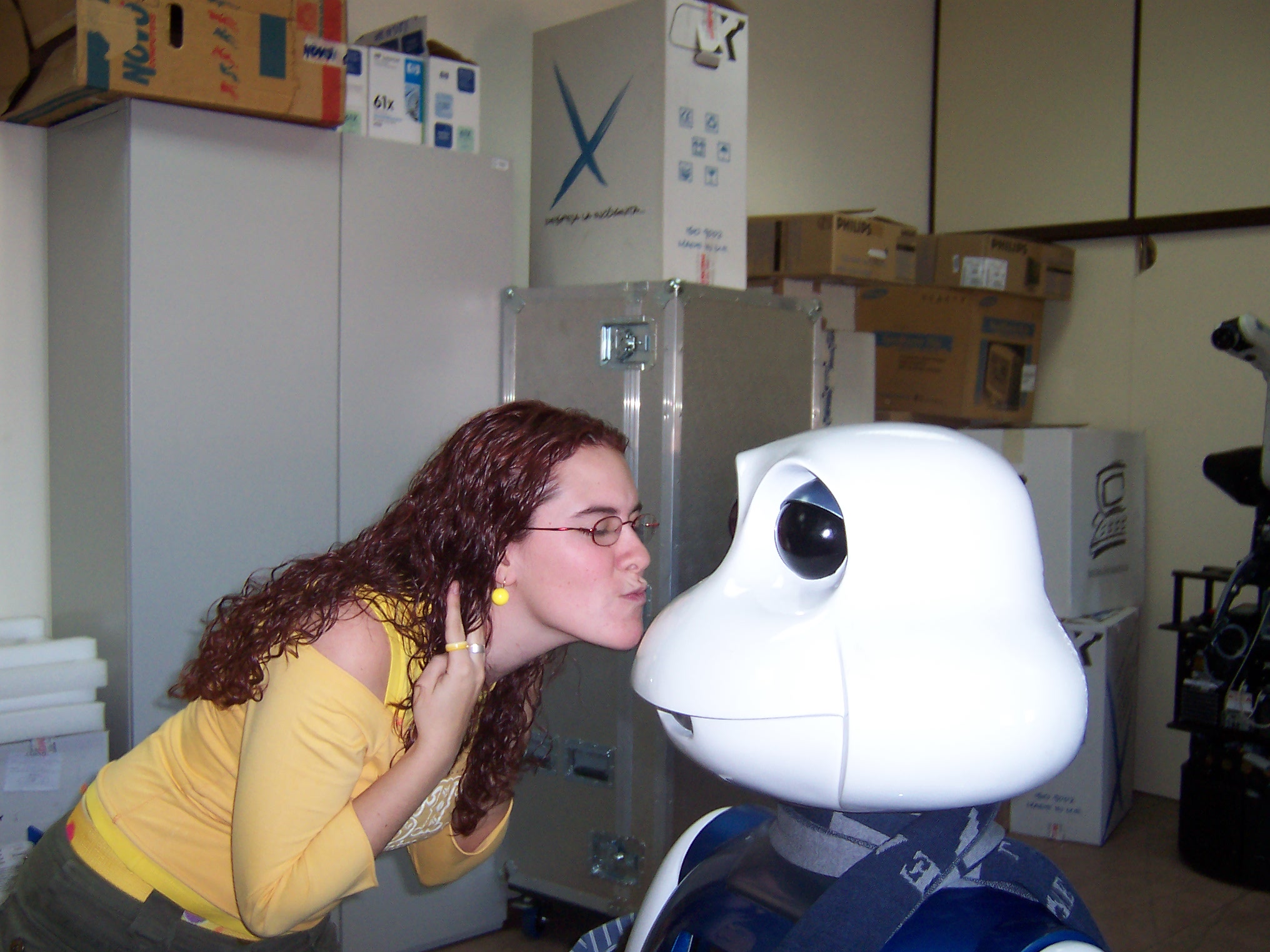
Hello! my name is Maggie and everybody says that I am a very funny and clever robot. I was born in spring 2005. My fathers and mothers (oh yes, I have many of them!) say that my creation was a very hard process. It took almost two years. Here are some photos.
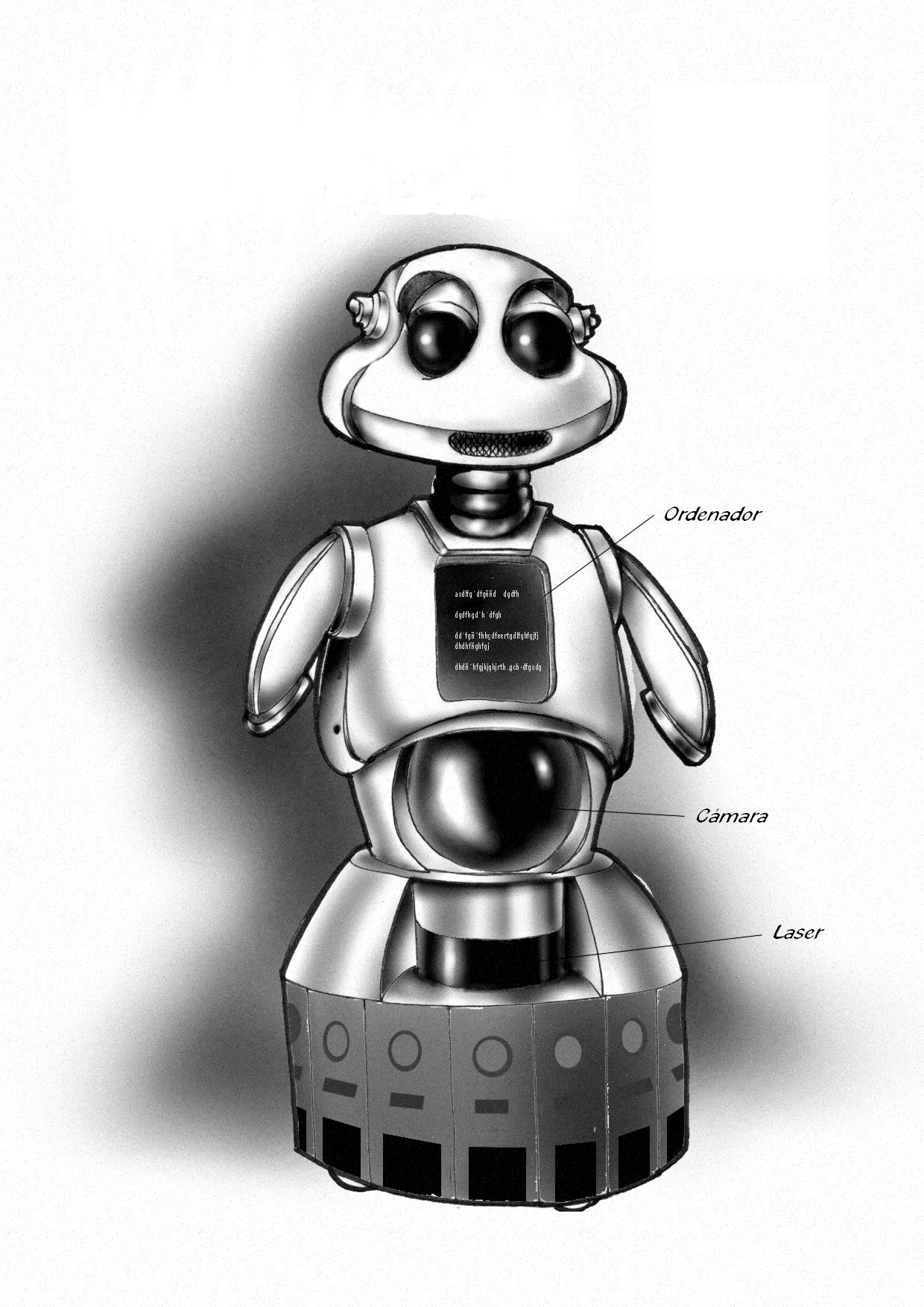
I am 1.4 m high. I can move my body, arms, head and eyes; and I can talk and recognise voice. I have many sensors: IR, US and laser range finders; TV cameras and tactile sensors on my body.
Robo Jack is a slot with 5 reels, 3 rows, and a total of 243 fixed paylines.
People can communicate with me by talking, using gestures and also touching me. I also have a touching screen on my chest.
I am very young and my skills are still very limited, but my parents are working hard to give me new capacities.
I am a personal robot. That means that I am a robot created to be close to people, to entertain and help them.
I love playing. My first public presentation took place in Campus Party 2005 and was broadcasted by many TV channels (see movies).