
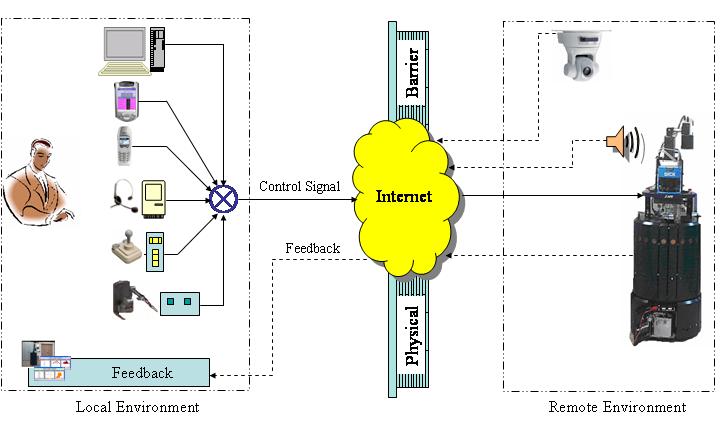
Regardless of the application, most of the remote interaction systems consist of the following basic components:
– An operator interface, incorporating an interaction device that the operator uses to send control commands to the remote system. There are many types of interaction devices such as PCs, mobile devices such as Personal Digital Assistants (PDA) and mobile phones, speech-based communication, joysticks and haptic interfaces.
– A mobile robot that performs the operator?s commanded actions at the remote site.
– A communication scheme between sites. It is recommended that the communication scheme have a robust signal communication link with an acceptable time delay; dedicated data links with sufficient throughput; and an effective data loss-recovery approach. As mentioned previously, although Internet is a cheap, readily accessible communication medium, its performance has nondeterministic characteristics.
– Feedback interfaces. Video transmission is commonly used to provide visual feedback for the operator. Video transmission demands high bandwidth availability. When this is not possible, computer-generated imagery supplies the operator with a virtual interface that combines low bandwidth sensory data to form a realistic image. These virtual interfaces are also useful to overlaying computer predictions or visual clues onto video images. Auditory feedback can also be used to enhance visual experience and human robot interaction. Although audio transmission requires low bandwidth, it is very sensitive to time delay and jitter. Other type of feedback can be provided using kinesthetic aids. Using haptic systems the operator can sense the response of its commands directly in the control interface.
Remote interaction systems can be used in many useful applications such as remote experimentation, teleoperation, teleperception, teleprogramming, etc.
Remote laboratories can be considered innovative environments, which can be used to provide remote interaction with mobile robots for educational and research purposes. They can be defined as network-based laboratories where the user and the real laboratory equipment are geographically separated and where telecommunication technologies are used to give users access to laboratory equipment. Such laboratories have the advantage that they are not restricted to synchronized attendance by instructors and students: thus they have the potential to provide constant access whenever needed by students.
In recent years, many researchers have built remote laboratories for mobile robots using similar architectures and implementation tools. Many such remote facilities can be put together to form a framework or a distributed laboratory that can be used to provide a coordinated set of experiments for students with hardware facilities physically spread over different locations, but accessible via the Internet. The project IECAT (Innovative Educational Concepts for Autonomous and Teleoperated Systems) in which RoboticsLab has participated is an example of such frameworks in the field of mechatronics. Such frameworks is an electronic workspace for distance collaboration and experimentation in research or in another creative activity, to generate and deliver results using distributed information and communication technologies. They assist in the exchange of existing hardware resources and educational materials between the partners.