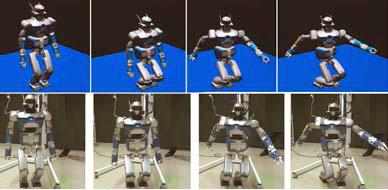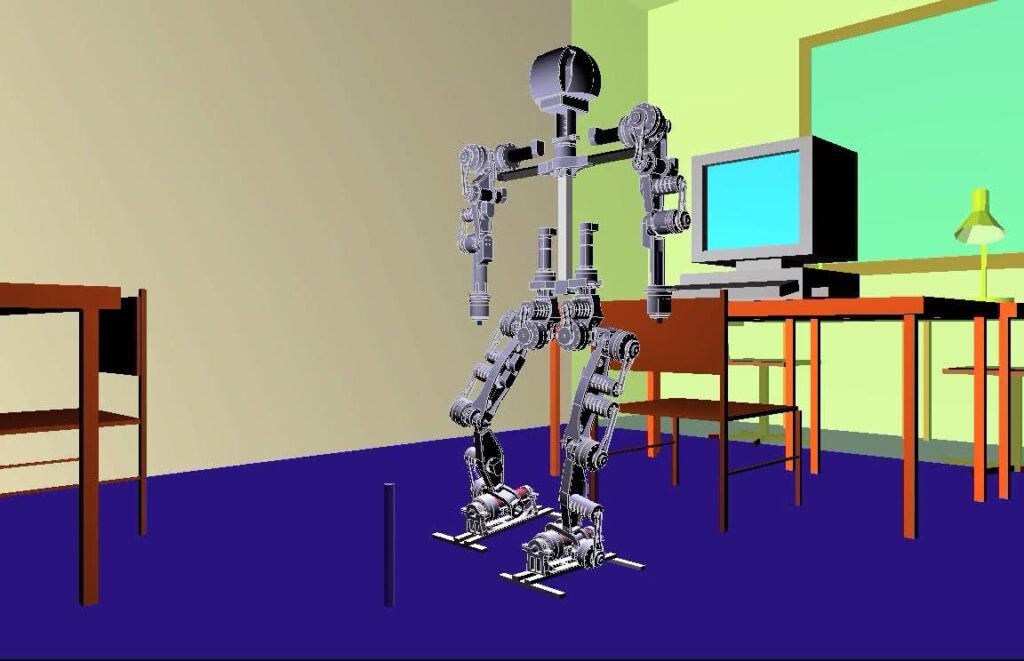
Otherwise, a generic gait was developed and implemented successfully, in the HRP-2 humanoid robot. It is called “Acyclic Gait”. This gait consists in make the dynamic transition between two statically stable stages. The results have been presented in the IROS ’08 (M. Arbulu et. al.). You could see some tests: