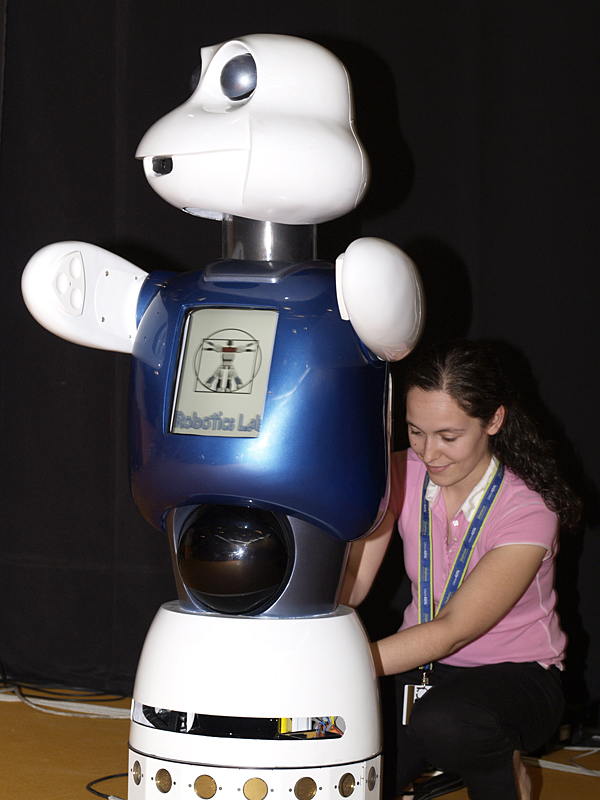
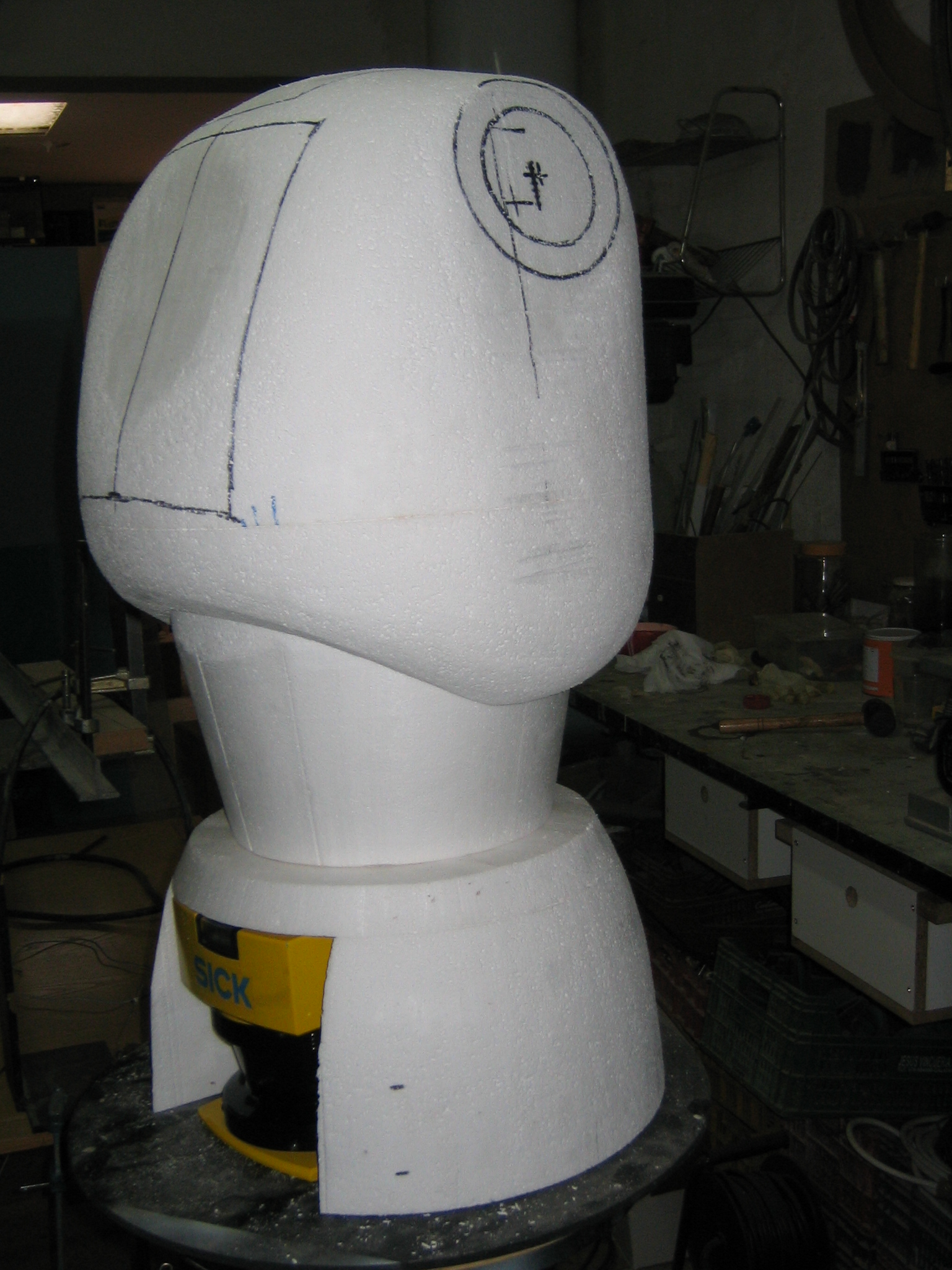
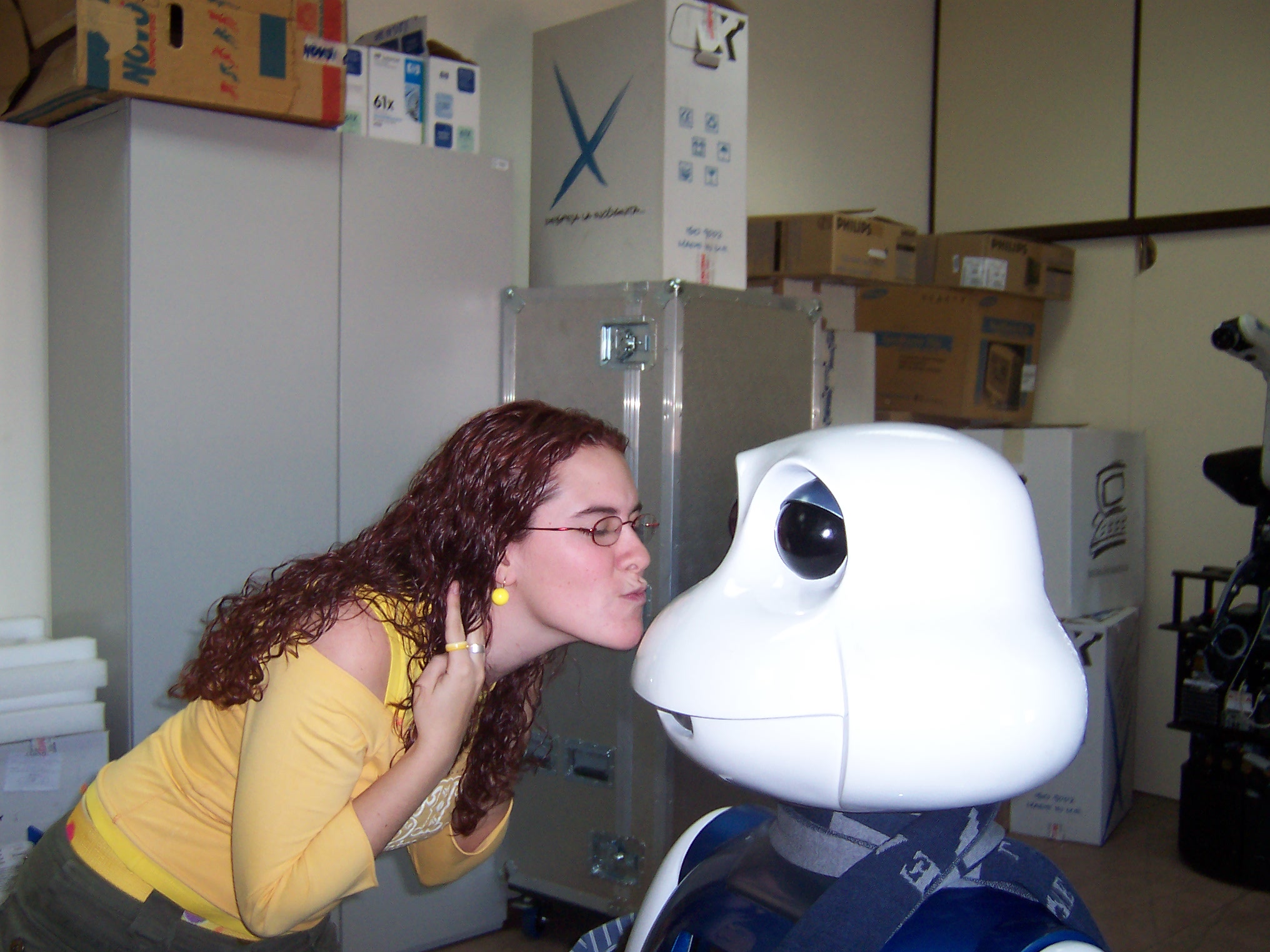
Hola! me llamo Maggie y todo el mundo dice que soy un robot muy divertido e inteligente. Nací en la primavera de 2005. Mis padres y madres (¡oh, sí, tengo muchos!) dicen que mi creación fue un proceso muy duro. Tardó casi dos años. Aquí tienes algunas fotos.
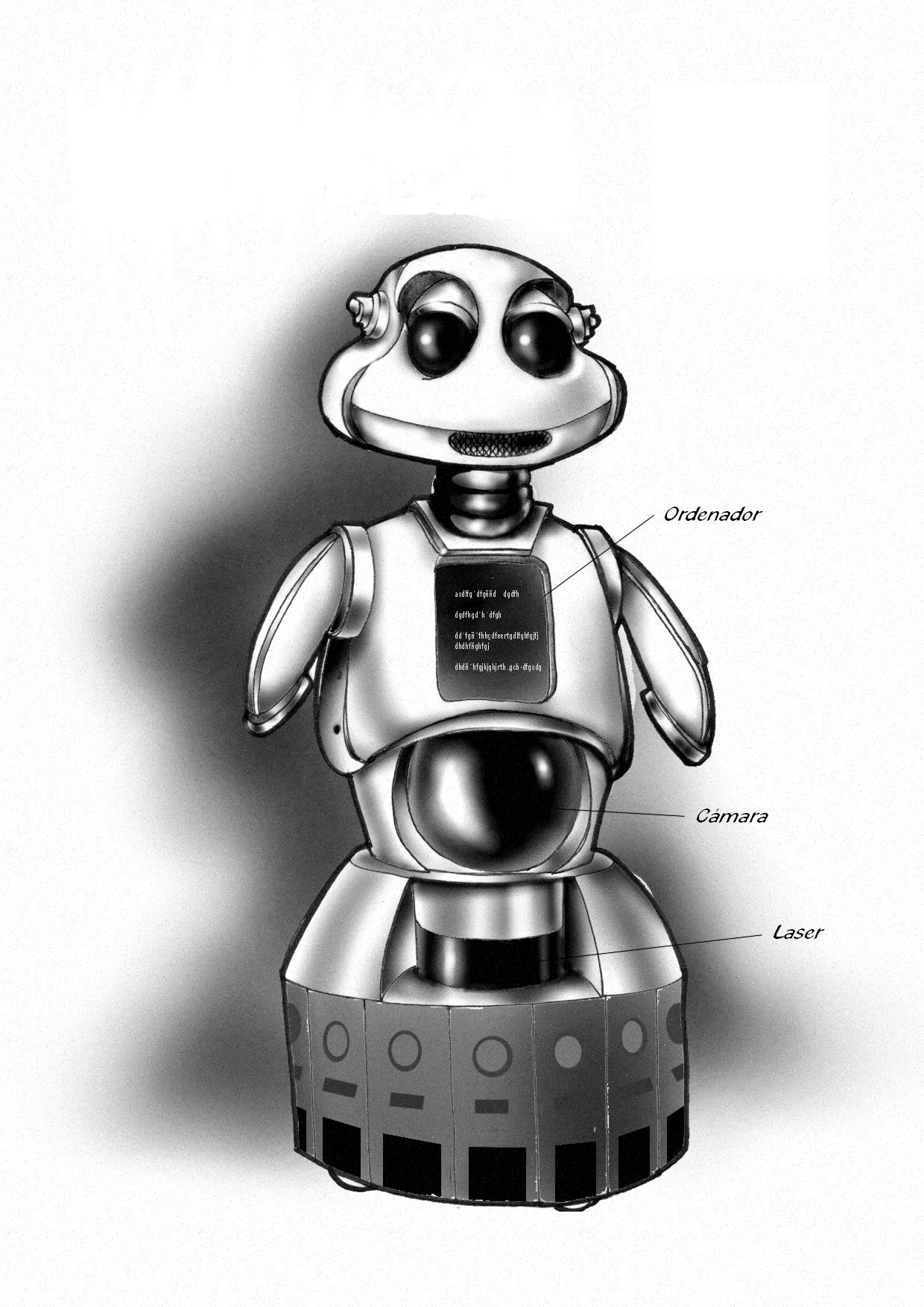
Mido 1,4 m de altura. Puedo mover el cuerpo, los brazos, la cabeza y los ojos; y puedo hablar y reconocer la voz. Tengo muchos sensores: telémetros IR, US y láser; cámaras de TV y sensores táctiles en mi cuerpo.
Robo Jack es una tragaperras con 5 rodillos, 3 filas y un total de 243 líneas de pago fijas.
La gente puede comunicarse conmigo hablando, utilizando gestos y también tocándome. También tengo una pantalla táctil en el pecho.
Soy muy joven y mis capacidades son aún muy limitadas, pero mis padres se esfuerzan por dotarme de nuevas capacidades.
Soy un robot personal. Eso significa que soy un robot creado para estar cerca de la gente, para entretenerla y ayudarla.
Me encanta jugar. Mi primera presentación pública tuvo lugar en la Campus Party 2005 y fue retransmitida por muchos canales de televisión (ver películas).