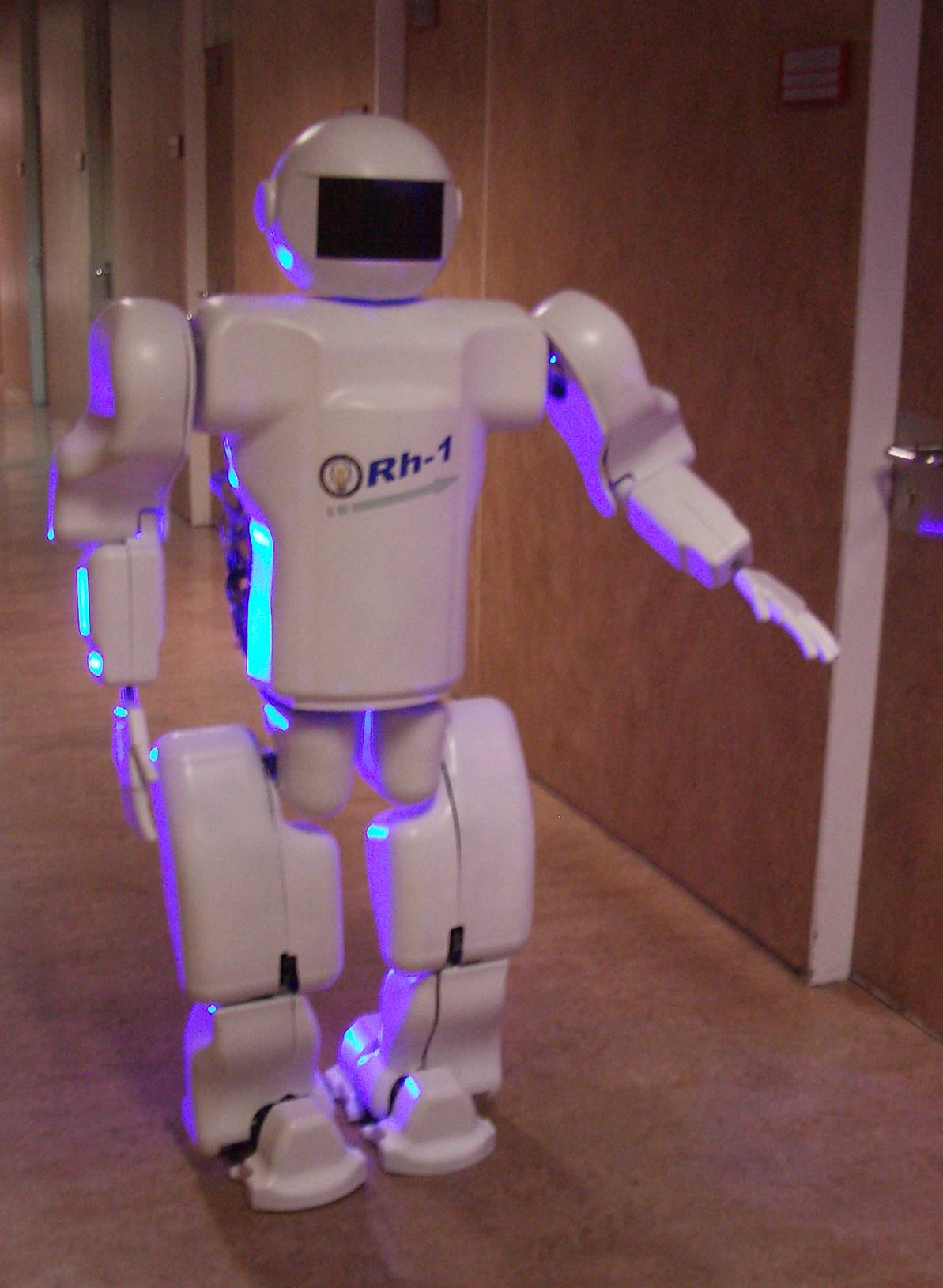
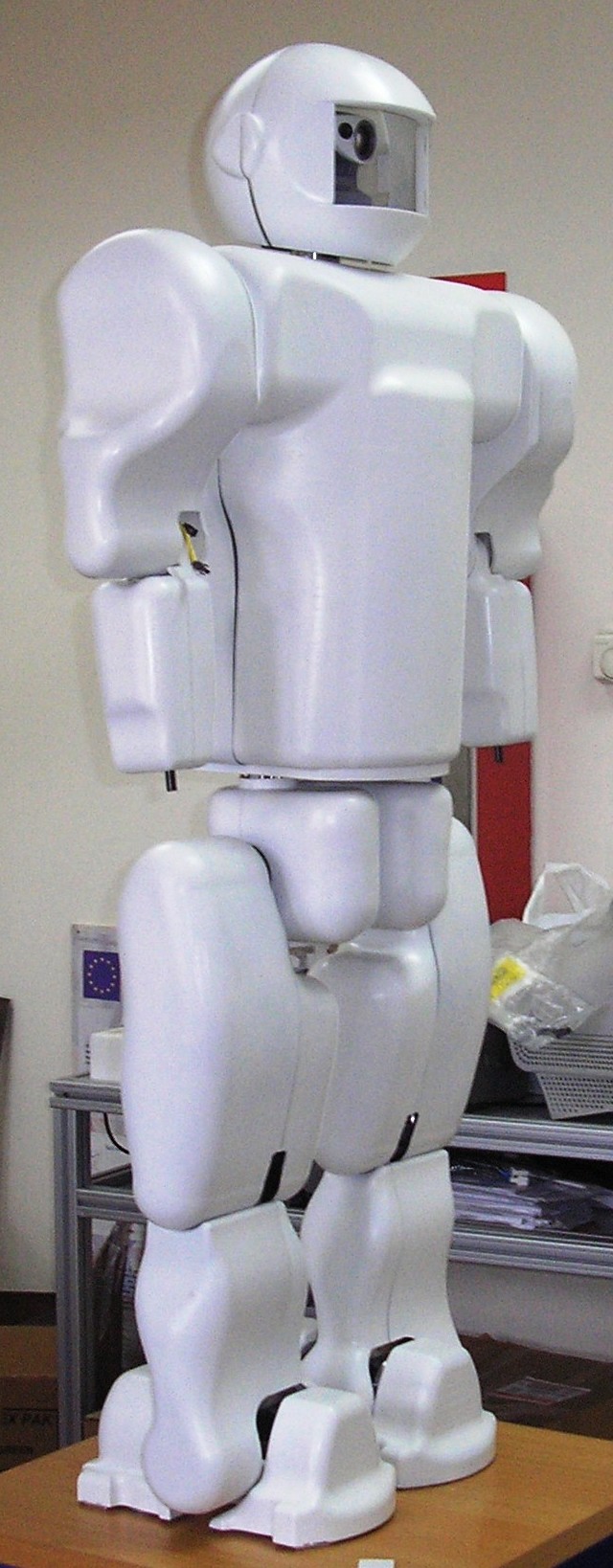
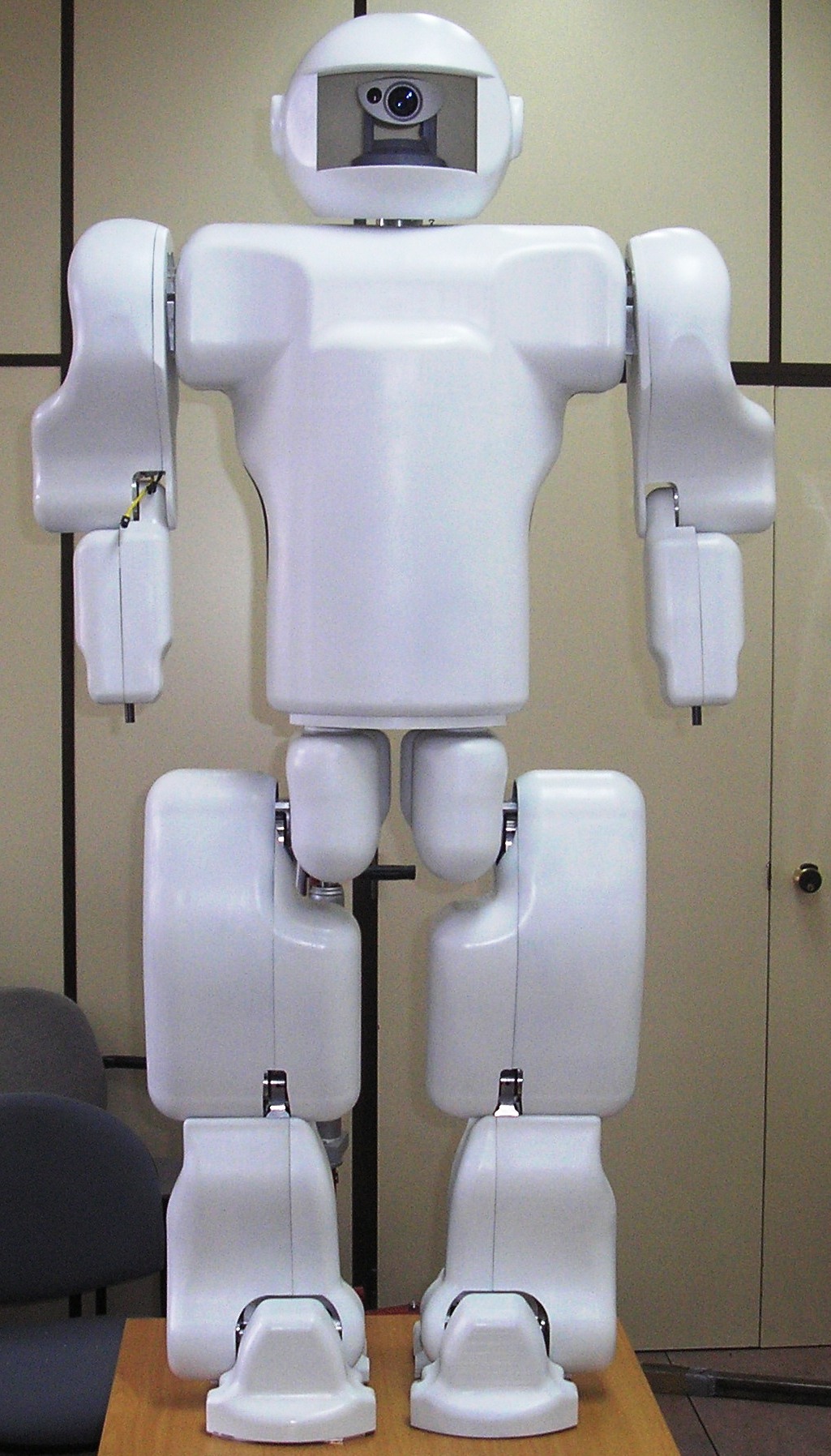
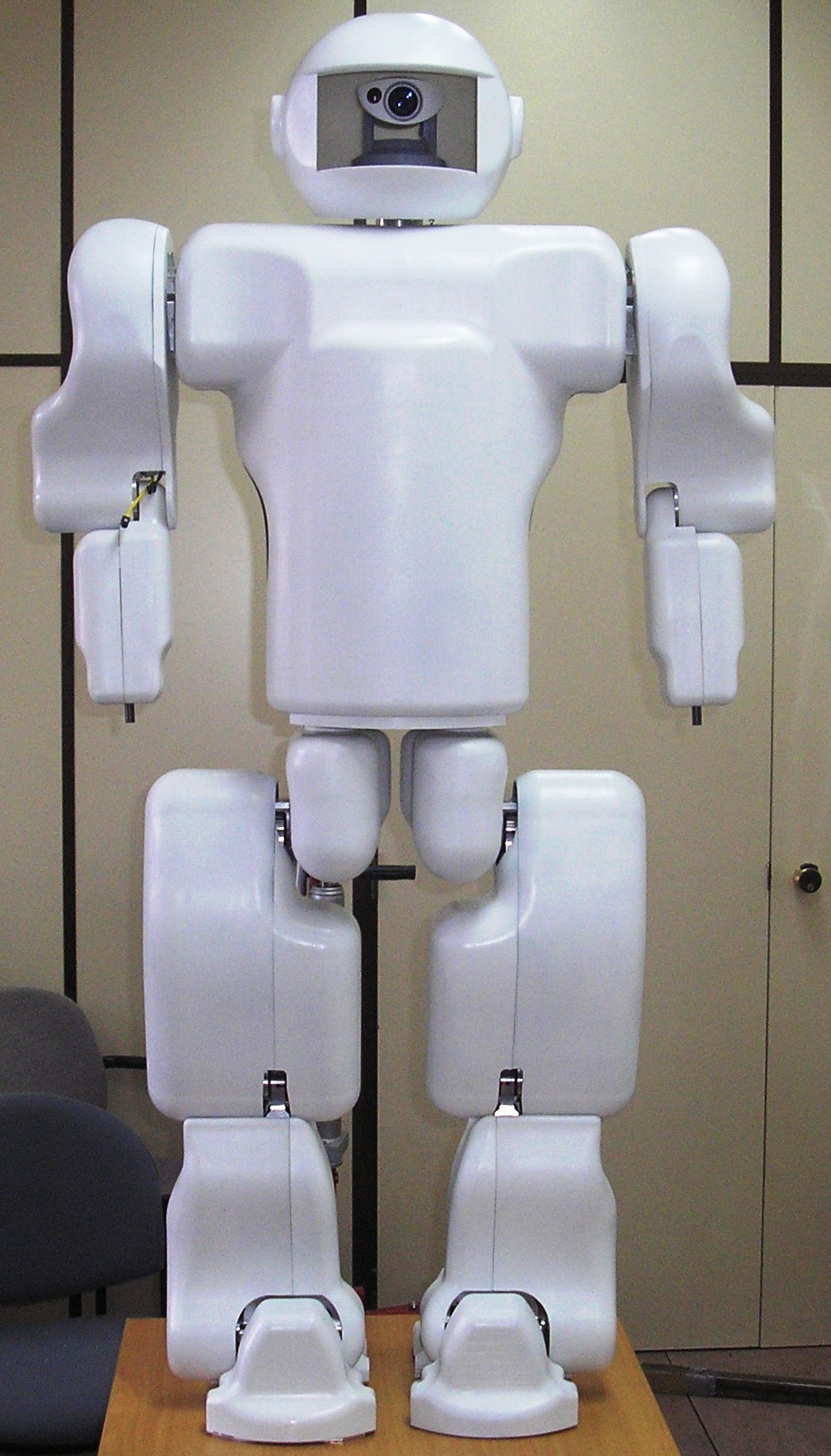
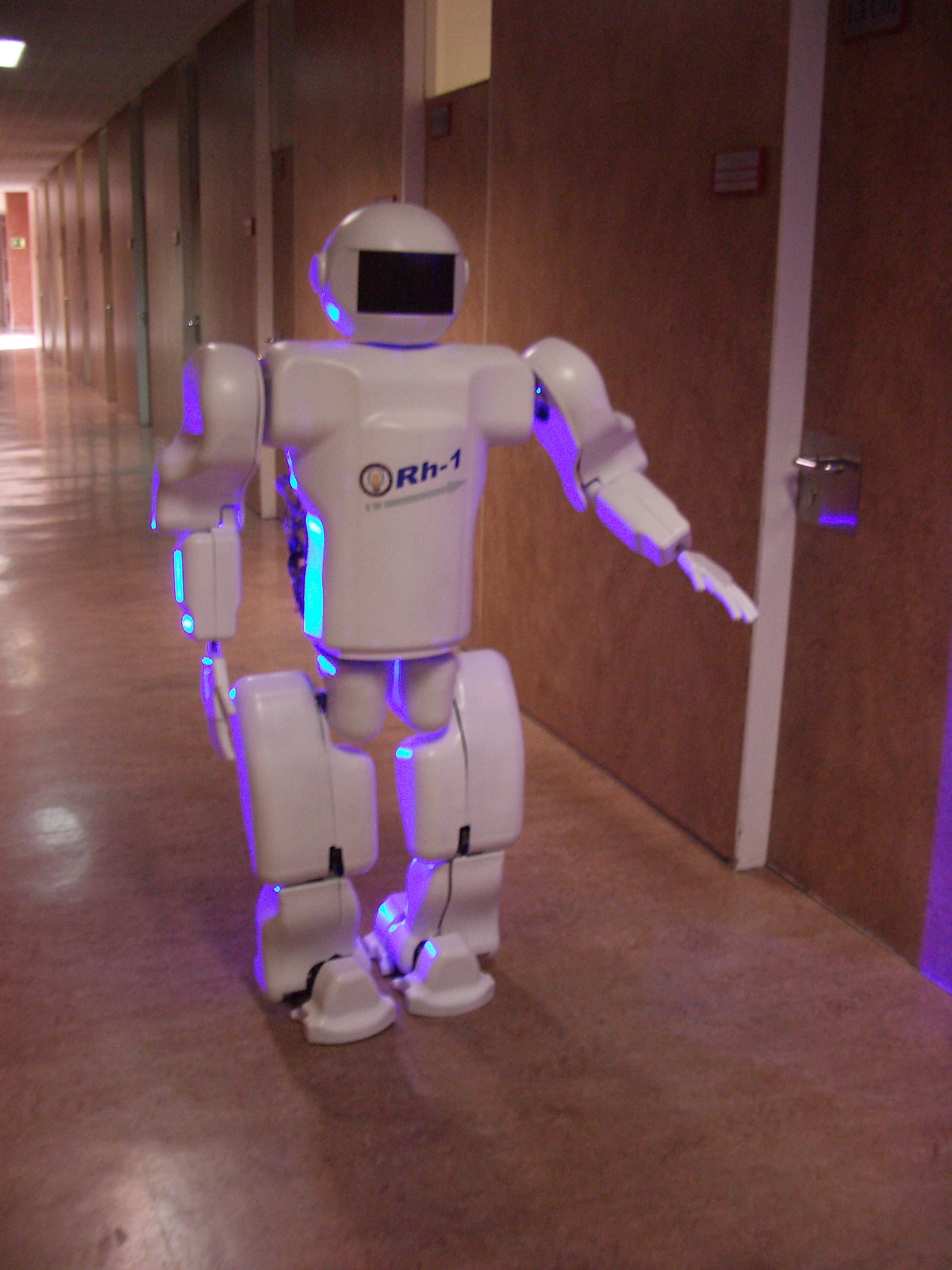
El robot humanoide Rh-0 (y su actualización Rh-1) es un robot de tamaño completo (1,3 m de altura, 21 DOF y unos 50 kg de peso). El robot está equipado con dos CPU a bordo y un sistema de comunicación por bus CAN. También lleva a bordo dos baterías que permiten 30 minutos de autonomía.
El sistema sensorial del robot se divide en dos partes: 1) sensores de locomoción (acelerómetros e inclinómetros) y 2) sensores para la interacción (cámara y micrófonos). La HMI del robot puede funcionar a través de los menús amigables del ordenador central o mediante comandos de voz.
La estrategia de control del robot se basa en la lógica de Lie y en técnicas PoE. La puerta del robot se calcula en dos fases: 1) mediante la generación dinámica fuera de línea de la puerta utilizando el módulo de planificación de trayectorias VRT desarrollado, y 2) mediante la modificación en tiempo real de la puerta utilizando la información de los sensores de locomoción.
La experimentación de locomoción estable del robot se ha realizado en varias condiciones (en el interior: laboratorio, pasillo, y en el exterior: zona del campus de nuestra universidad) y con varias puertas (línea recta, giro, una gimnasia de apoyo a la alimentación), etc. Películas en movimiento