Funder: Project TED2021-129420B-I00, funded by MCIN/AEI/10.13039/501100011033 and the European Union's "NextGeneration EU/PRTR''
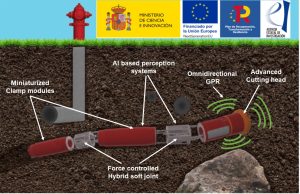
The main objective of the ROBOSUB project is the development of intelligent miniaturised microtunnelling technologies to contribute to climate change mitigation, adaptation to climate change, sustainable use and protection of water and marine resources, circular economy, pollution prevention and control, and protection and recovery of biodiversity and ecosystems. In the same line, these technologies will […]
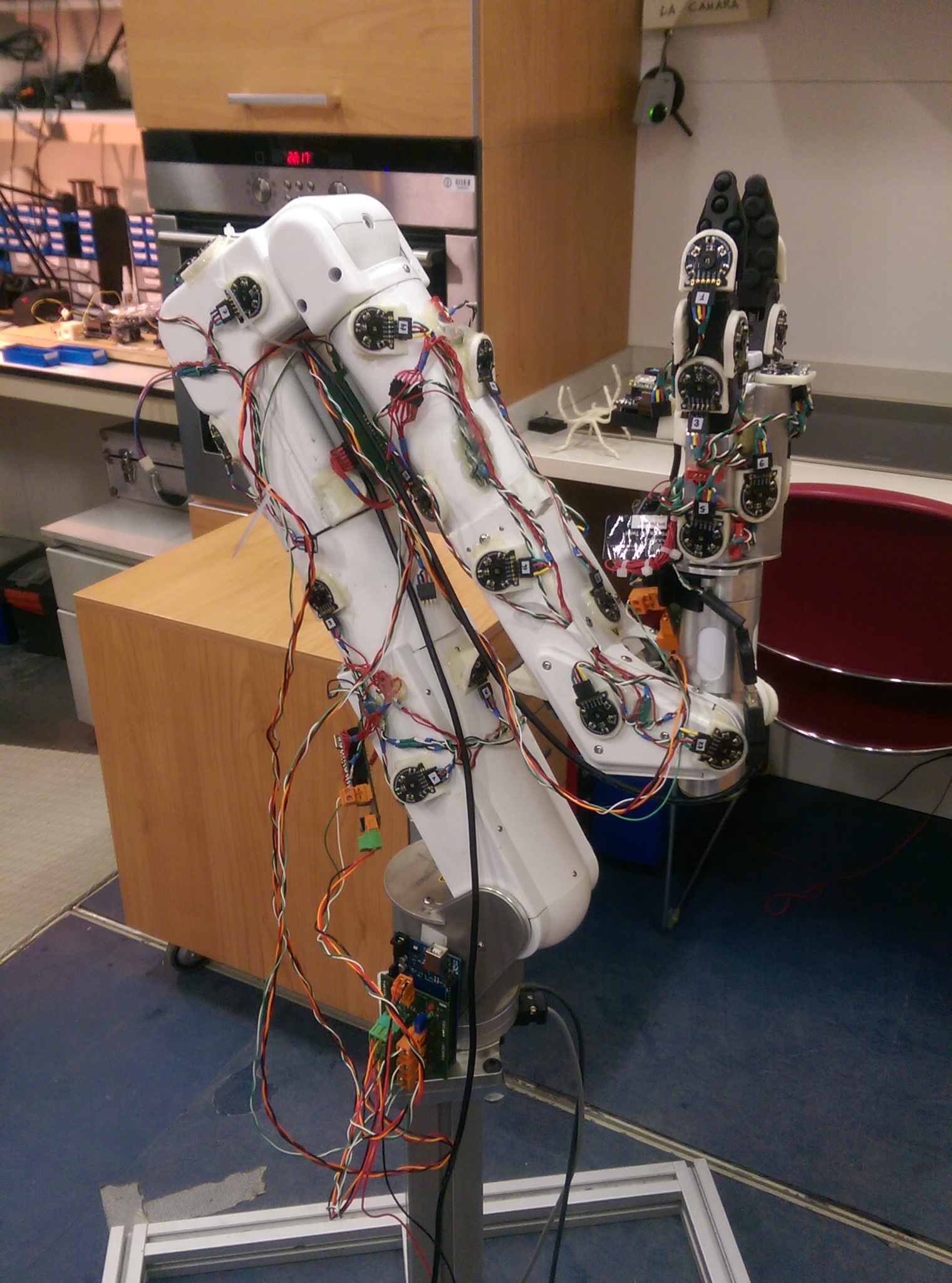
Manipulation of 3D objects using vision based control techniques
Start: 2005
End: 2007
Funder: CICYT
The aim of this project is to search ways of approach and manipulation of 3D objects by robotic manipulator using vision and force control. The grasp and approach can be determined according to the shape of the object and the free space to reach it.
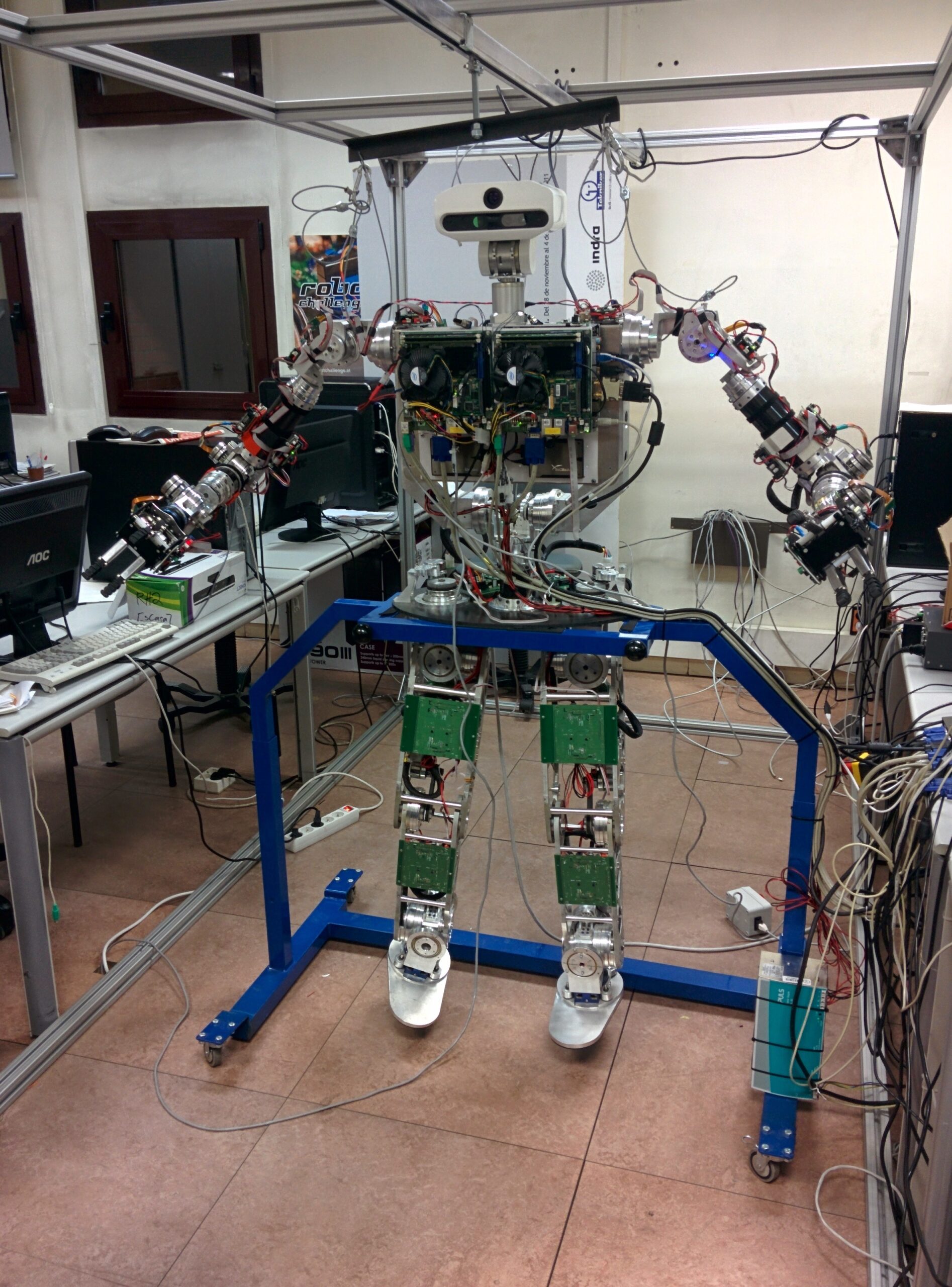
Development of a robotic assistant for people with different types of disabilities, specially blinds and wheelchair-based, in domestic environments. The mobile manipulator must not only have the ability to navigate in a closed environment, but also have the ability to easily manipulate daily objects to bring them to the user. On the other hand, human-robot interactions must be multimodal
Algebraic Machine Learning (AML) has recently been proposed as new learning paradigm that builds upon Abstract Algebra, Model Theory. Unlike other popular learning algorithms, AML is not a statistical method, but it produces generalizing models from semantic embeddings of data into discrete algebraic structures.
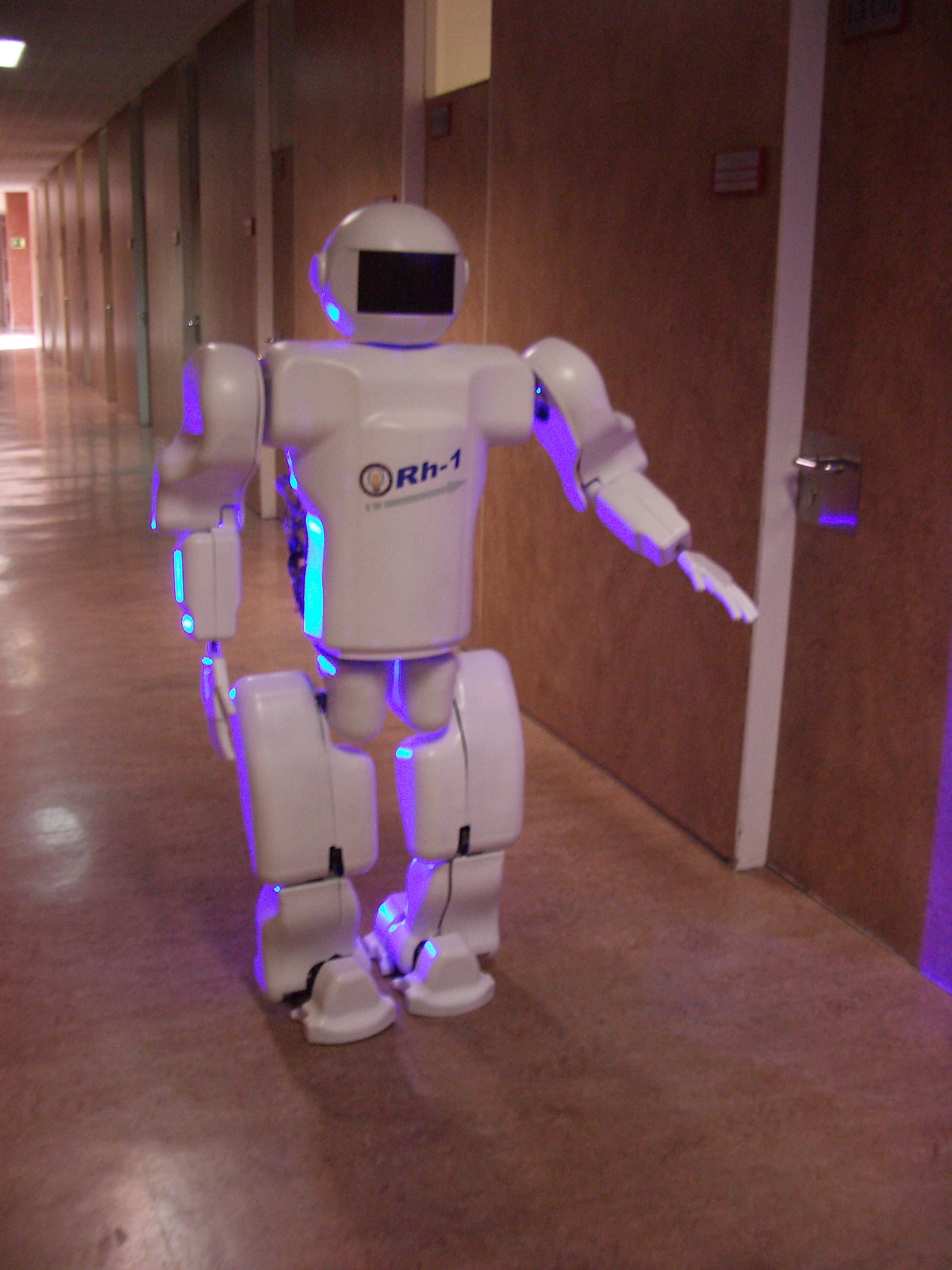
This Project is focused on the development of social robots. Several scientific and technological themes of special interest for the development of social robots are investigated. Those themes are, among others, the specific design of this kind of robots, the perception systems, decision-making systems, or the human-robot interaction systems.
Robotic cognitive assistant for persons with special needs
Start: 2011
End: 2013
Funder: CICYT
The objective is the development of a new concept of assistential domestic robotic environment that will allow people with special needs to increase their capacity of manipulating different objects and to increase their cognitive and haptics abilities.