rcorreal
Normal
rcorreal
26
188
2009-12-09T15:31:00Z
2009-12-09T17:48:00Z
1
816
4493
TCP
37
10
5299
11.5606
130
Clean
Clean
21
false
false
false
MicrosoftInternetExplorer4
Alternate email:
raulcorreal (at) hotmail (dot) com
Bio
Raul Correal is an associate researcher at the Systems
Engineering and Automation department at the University Carlos III of Madrid since Nov. 2002,
when he started doing research in the area of Control of Assistive Robotics.
Since then he’s been involved in several projects and research activities.
He
received his Technical Engineering in Computer Systems Sciences from the
University Polytechnic of Madrid in 1998, a Superior Computer Science Engineering
degree from UNED University in 2005 and a MS in Computer
Sciences and Intelligent Robotics from the University of
Southern California (USC) in 2007.
His
research interests include mobile robots, planetary exploration rovers,
autonomy, outdoor navigation, computer vision, human-robot interaction,
multi-robot cooperation and machine learning.
Research
My
research interests are mainly robotics, autonomy and AI. I’ve been
working in three main areas:
<![if !supportLists]>·
<![endif]>Assistive Robotics
<![if !supportLists]>·
<![endif]>Service Robotics
<![if !supportLists]>·
<![endif]>Space Robotics
Lately
I’m focused in outdoor autonomous navigation, non-structured rough
terrain or road/urban environments, computer vision, robots in human
environments and its interaction, multi-robot cooperation, decision-making and
machine learning.
Assistive Robotics
Devices for
disabled, elderly and users with specials need to assist in daily activities
such as shaving, eating, teeth brushing, grasping objects, etc. with the main
purpose of improving their quality of life and increase their independence.
Projects
MATS. Developed
at the Systems Engineering and Automation department, University Carlos III of Madrid.
ASIBOT. Developed
at the Systems Engineering and Automation department, University Carlos III of Madrid.
The purpose of these two projects is the development
of robotic assistive technology to help elderly and disabled people in its
daily tasks such as shaving, eating, drinking, grasp objects, etc. in order to
increase their level of independency. Concretely, it consists of a
climbing-manipulator robotic device, able of moving through the environment
(e.g.: home, work, etc.) using specially designed connectors installed in walls
and ceiling. That way, it avoids saturating the floor space, what is very
valuable for a wheelchair user.
Links
Some Pics
More
Pics
Keywords
Assistive Robotics, Control Architectures, Human-Robot
Interaction, Onboard Software, Voice Recognition & Speech Synthesis,
Wireless Communications.
Service Robotics
Robots designed to provide a concrete service such as
cleaning, surveillance, agriculture, construction, entertaining, etc.
Projects
Tourguide.
Developed at the Interaction Lab, University of Southern
California. The purpose of the Touguide project is to develop technology able to offer a
tour to different visitors at any moment. In this case, a robot will be in
charge of welcoming visitors in the lab and give them a tour and explanations
about what research work is being carried out within the lab by students and
researchers.
Links
Some Pics
My website at
the Interaction Lab (USC)
Keywords
Autonomous Navigation, Collision Avoidance, Visual
Pattern Recognition, Speech Synthesis, Human-Robot Interaction
Space Robotics
Focusing in autonomous navigation
for planetary exploration rovers and computer stereo vision.
Projects
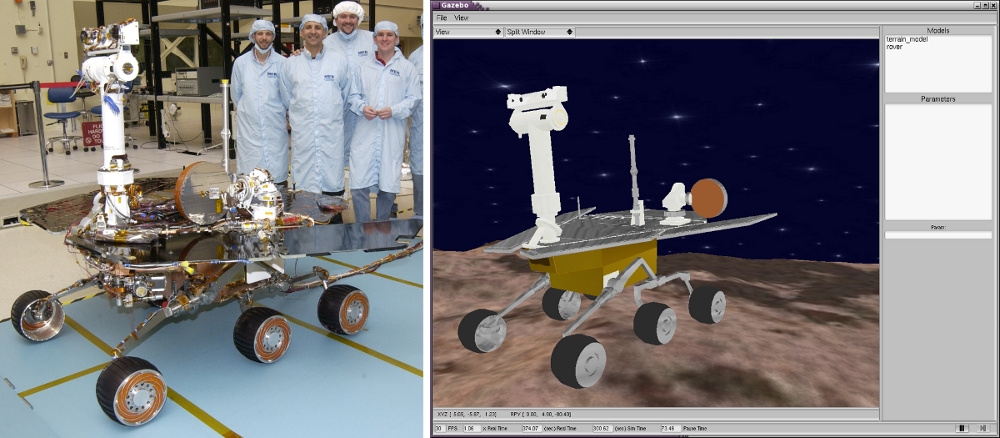
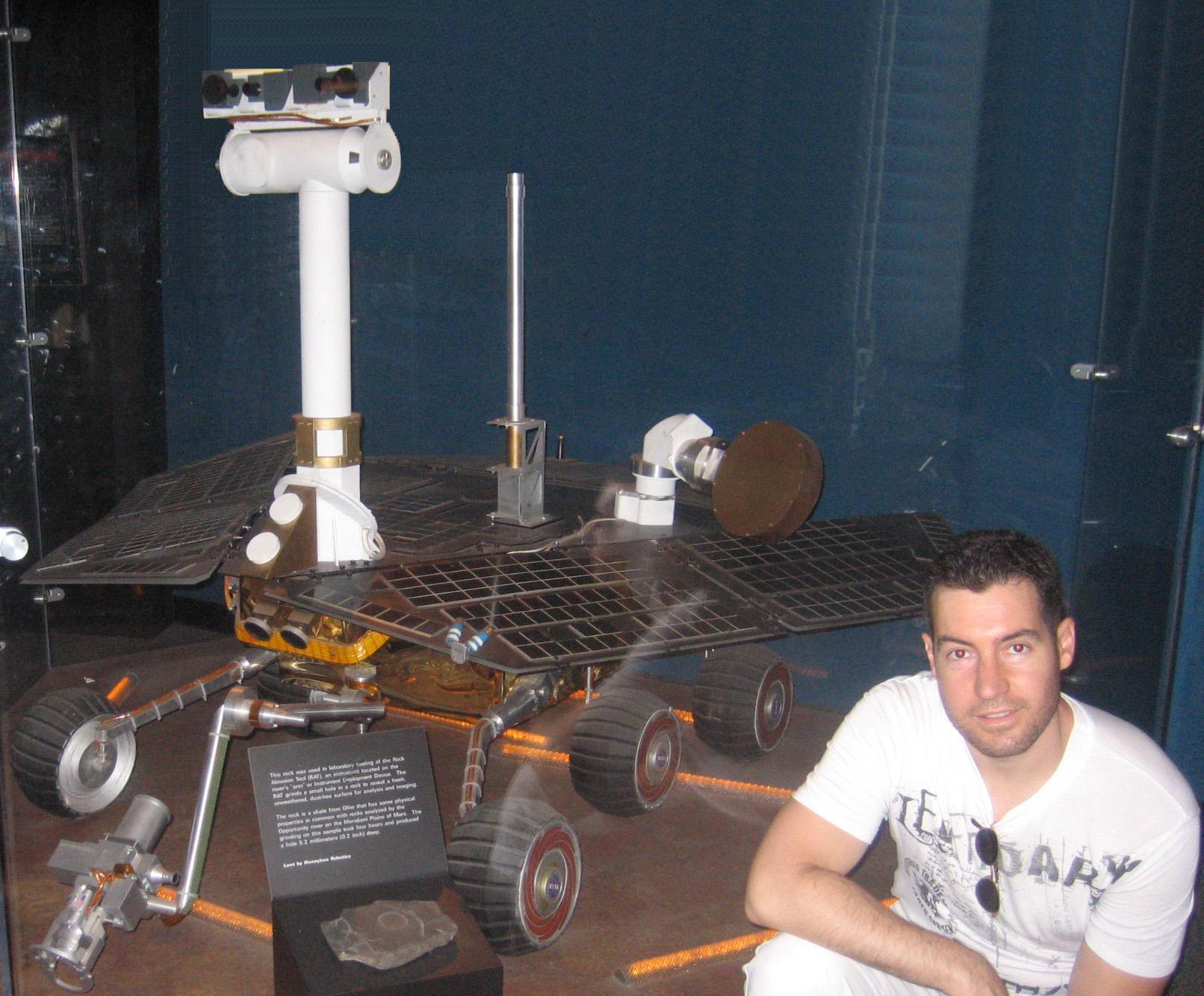
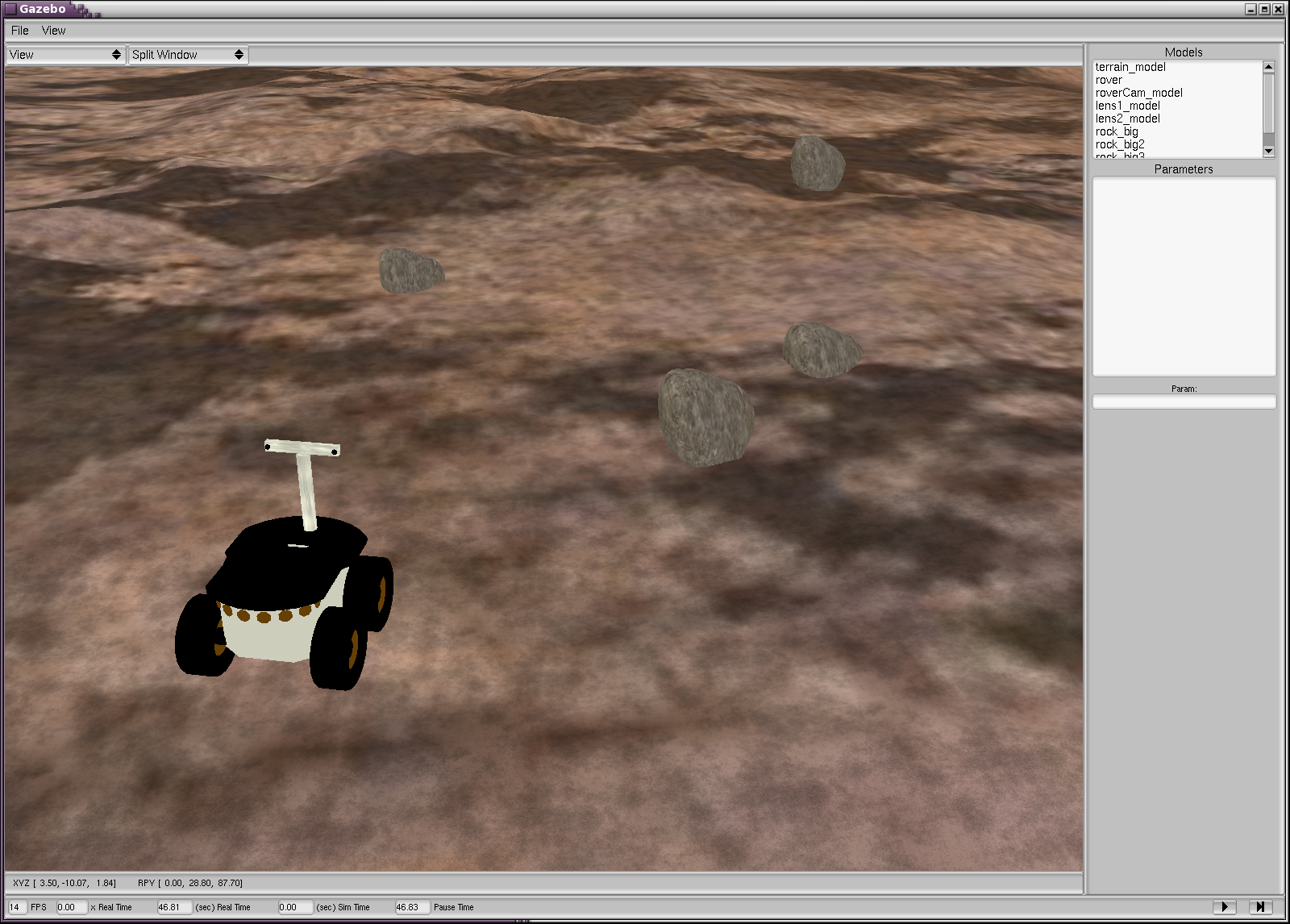
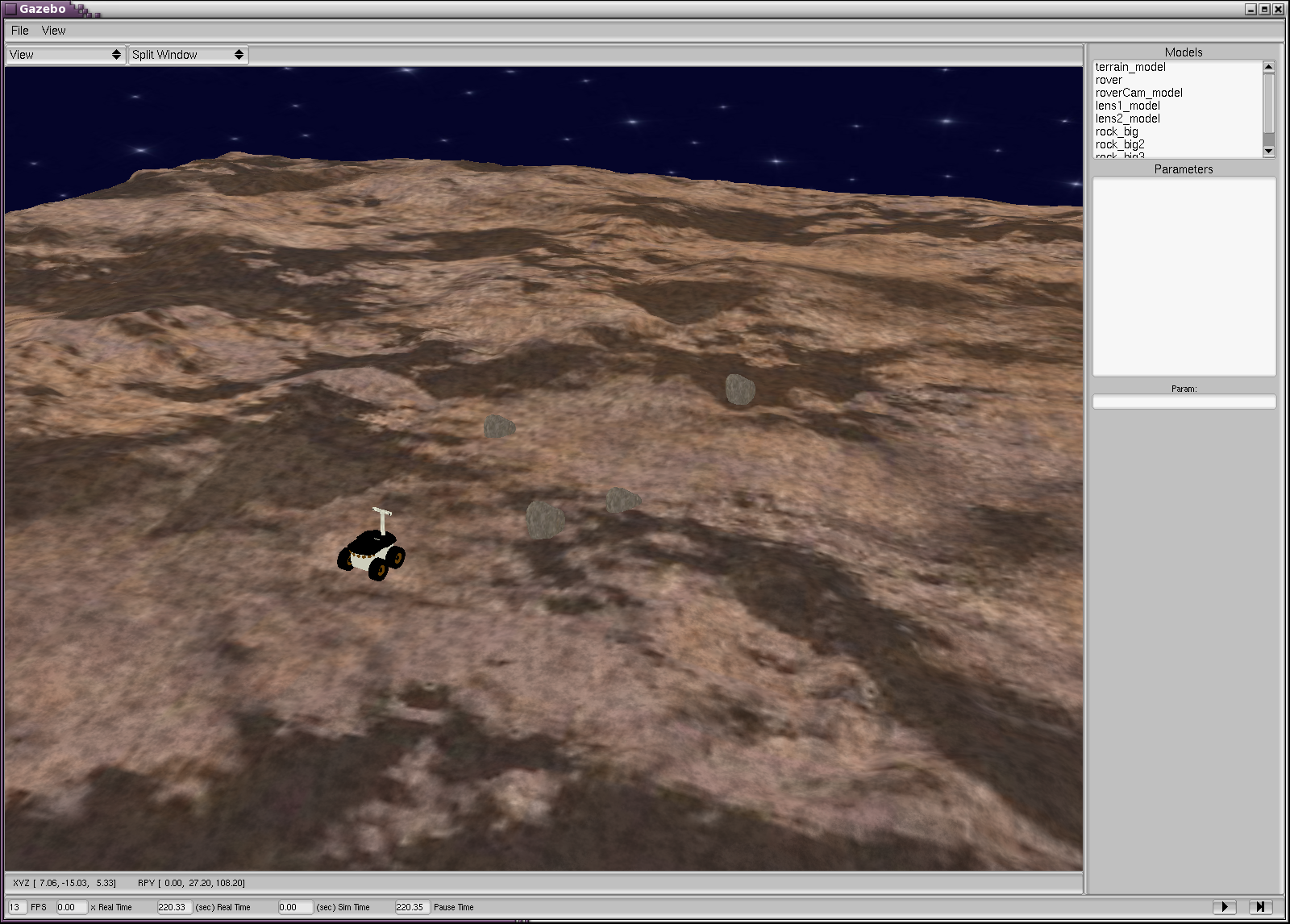
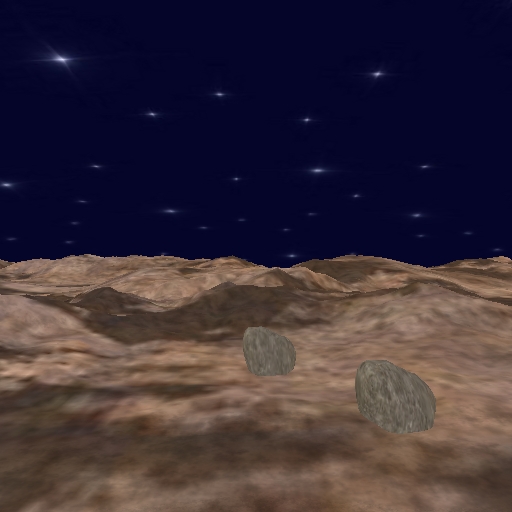
Autorover. Developed at
the Roverlab, TCP Sistemas
e Ingenieria, aerospace division. The
purpose of the Autorover project is to develop
technology that allows increasing the level of autonomy onboard planetary
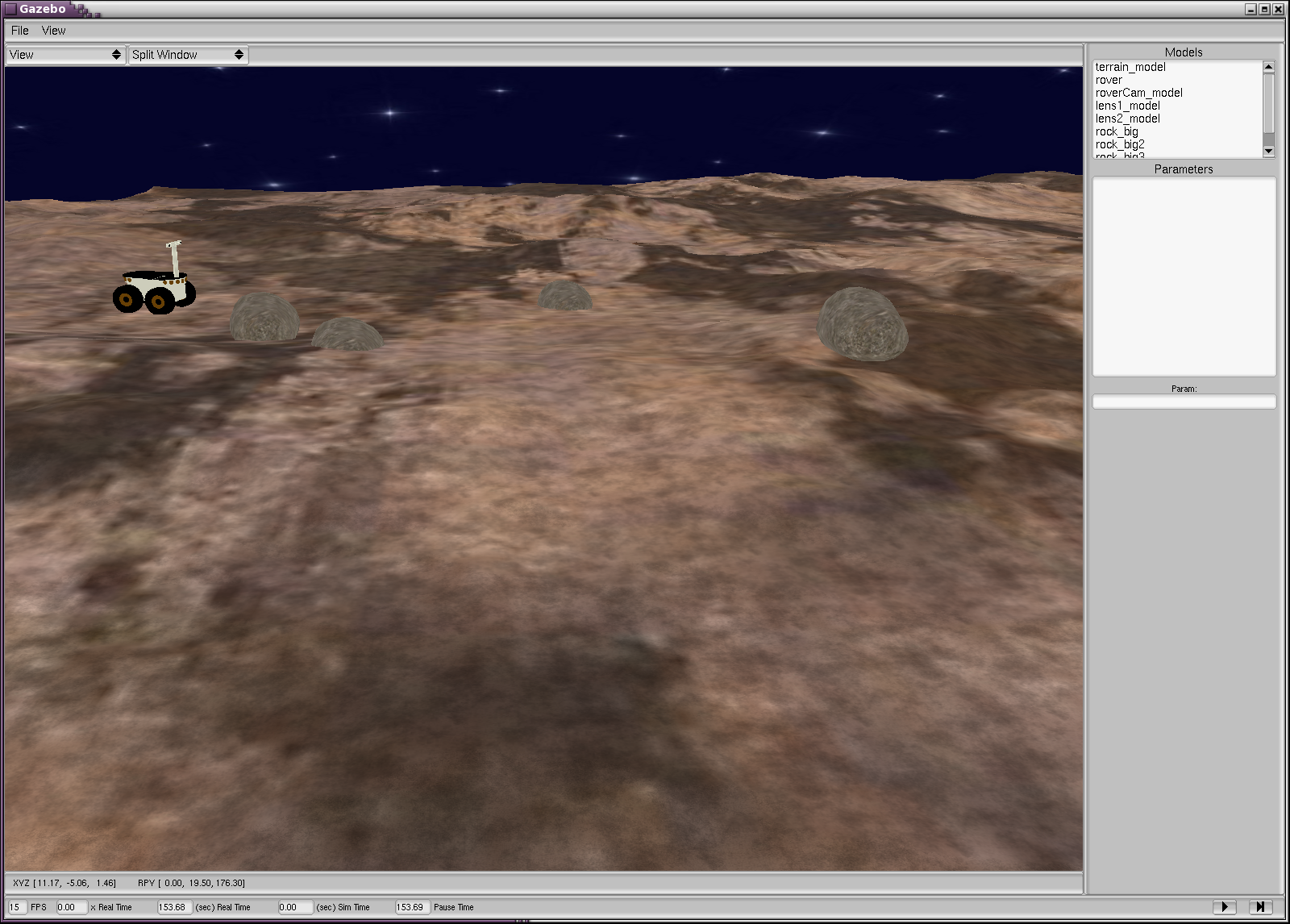
exploration rovers, mainly for Mars and the Moon. In its early stages
it’s focused in setting the necessary framework to allow these
developments, in the sense of simulation, control center and ground station,
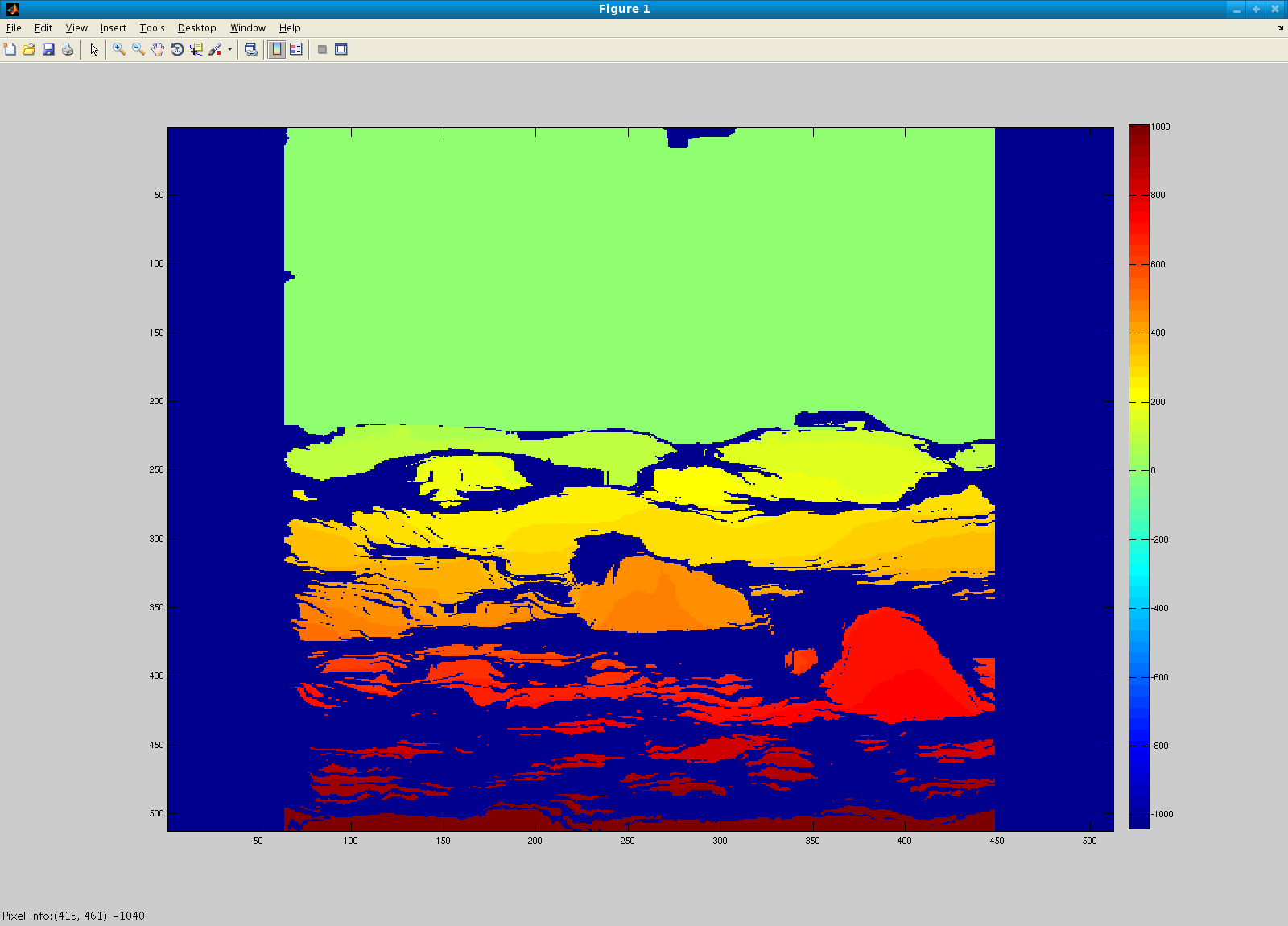
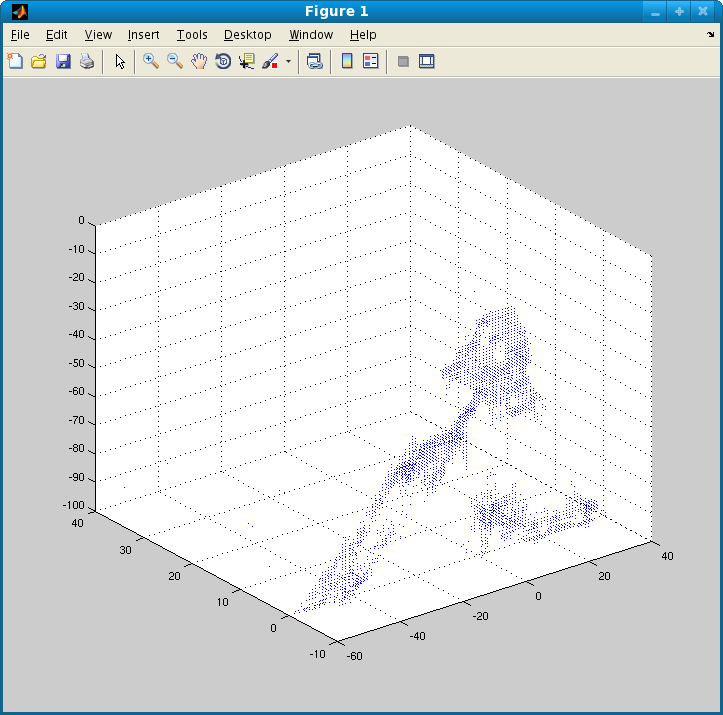
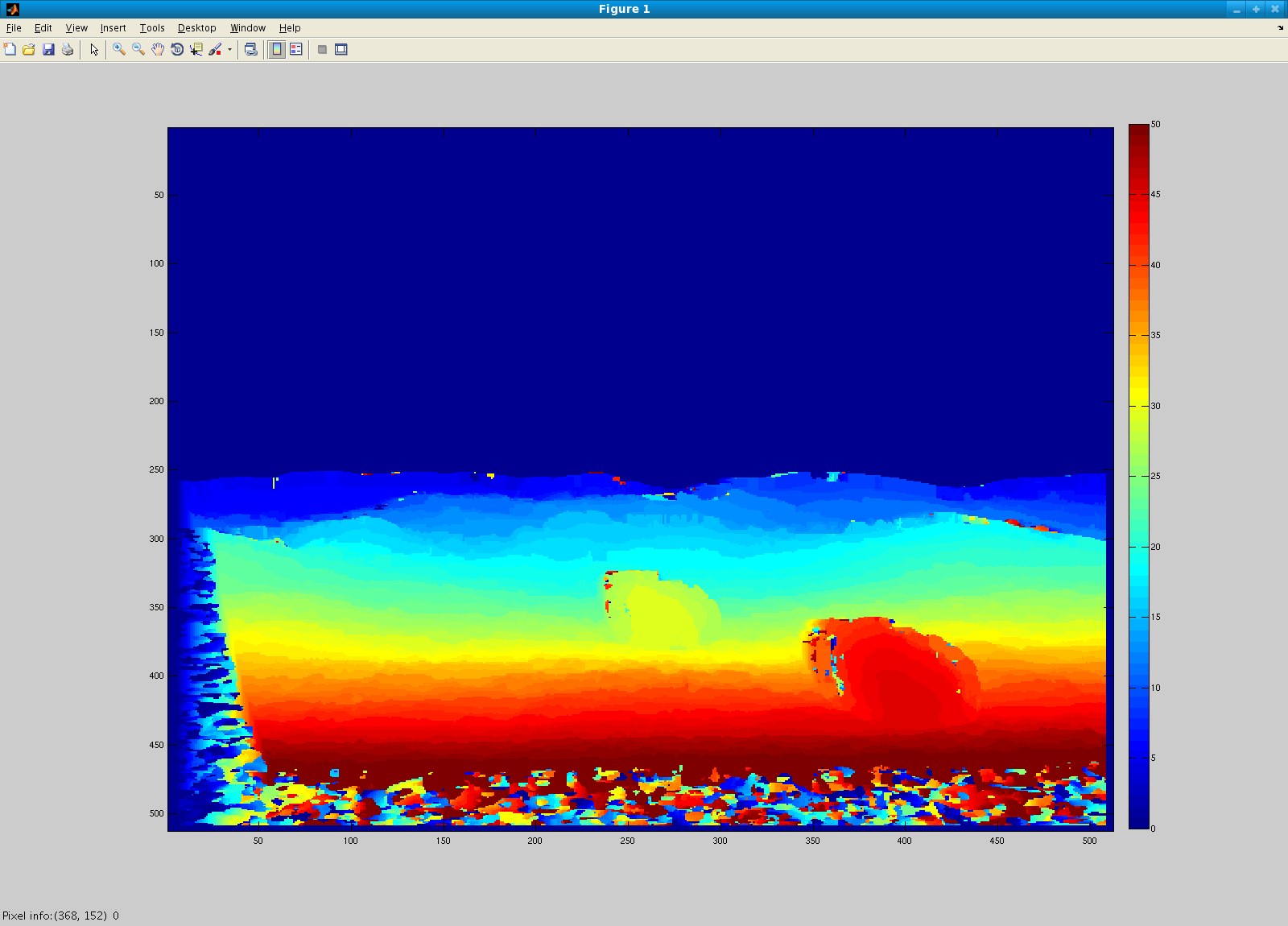
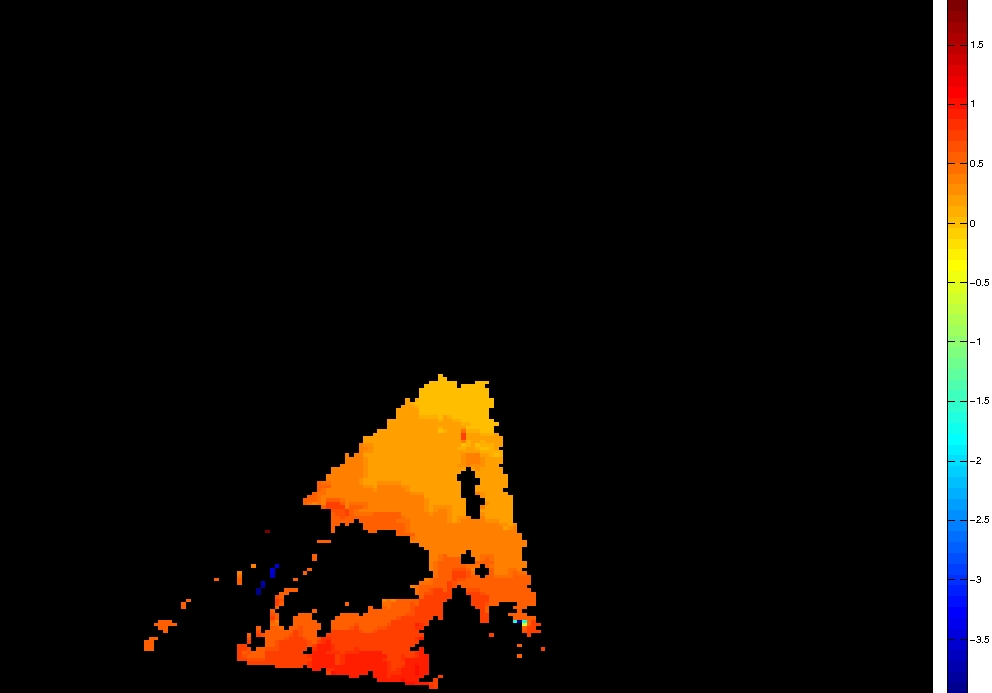
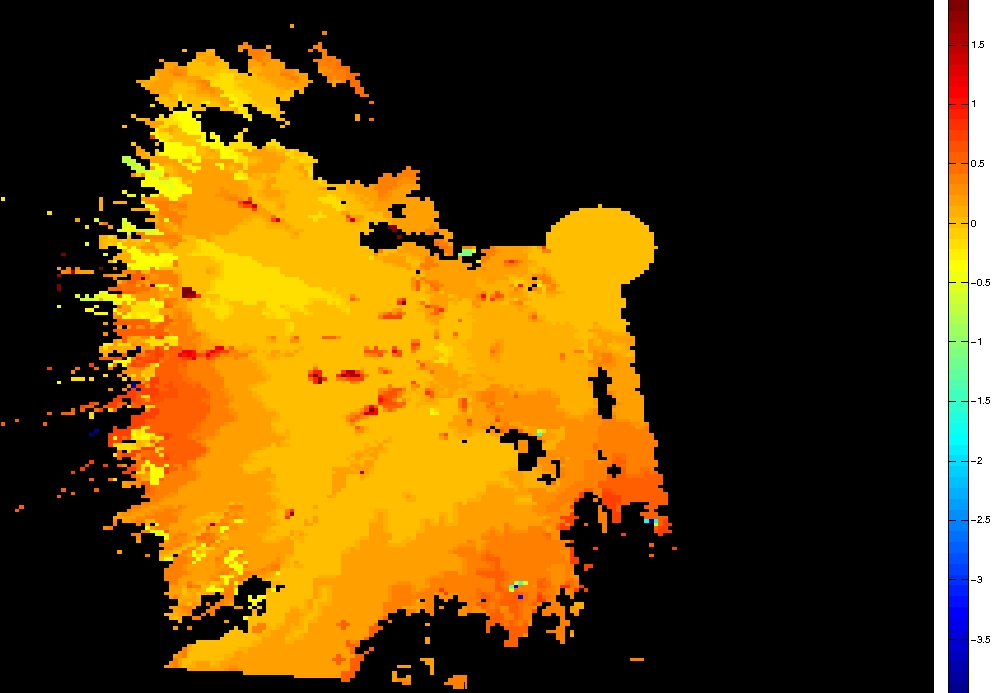
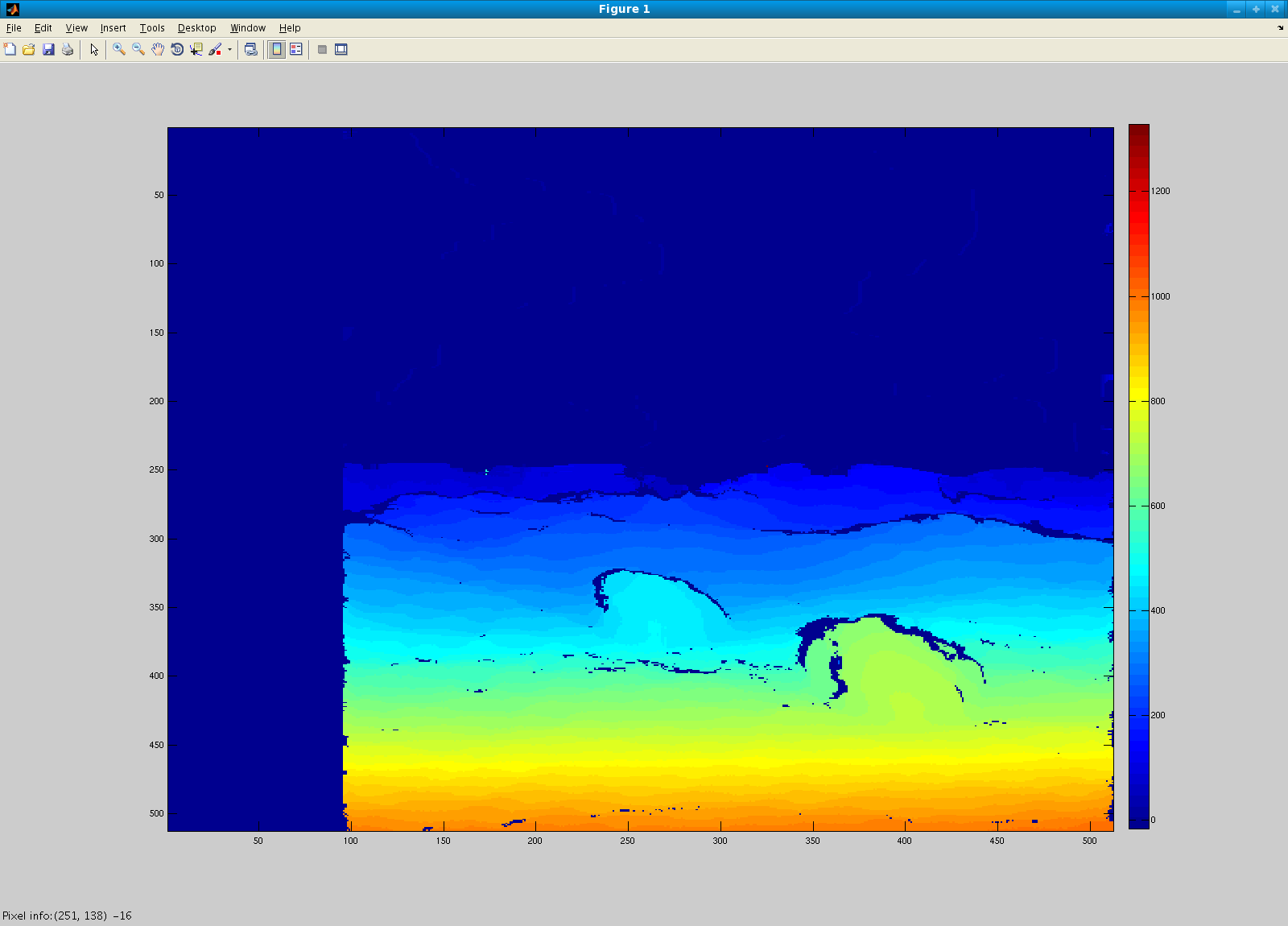
communication links, etc. The second project objective is the development of
the necessary algorithms to achieve full autonomous navigation. It implies
computer stereo vision to get depth information, Digital Elevation Map
building, path planning, trajectory execution and obstacle avoidance, replanning, etc.
The ultimate goal is to achieve onboard mission-level
autonomy, having a rover able to make its own decision, task planning and
scheduling and contingency management, maximizing the scientific return of the
mission.
Links
Some Pics
Keywords
Planetary Exploration Rovers, Autonomous Navigation in
Rough Terrain, Computer Stereovision, Obstacle Avoidance, Artificial Intelligence,
3D Terrain Mapping (DEMs), Path Planning, Trajectory
Execution, Sensor Processing, Collision Avoidance, Planetary Environment/Rover
Modeling and Simulation, and Onboard Software Architecture Design.