
The ability of manipulating a wide variety of a priori unknown objects permits the mobile manipulators to operate in unstructured environments. This ability also helps people when they are developing certain tasks. In order to acquire this skill, the mobile manipulators need highly flexible mechanic hands. These hands must operate autonomously. Besides, they must be secure and friendly when executing a large range of high level tasks. We are implementing control strategies in the
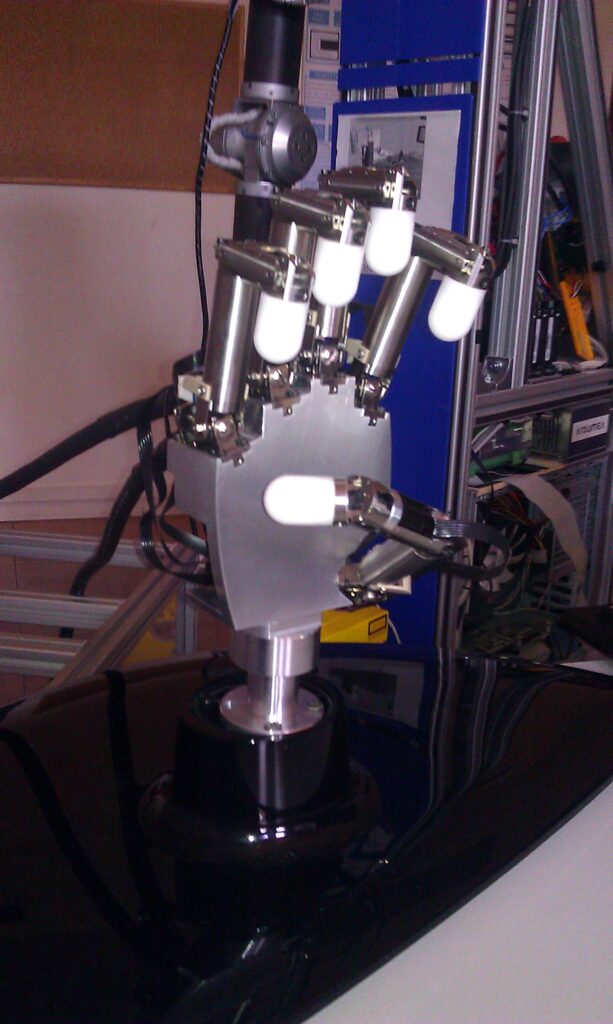
Gifu Hand III, developed by the Kawasaki and Mouri Laboratory at Gifu University.
The Gifu Hand III has a thumb and four fingers. The thumb has 4 joints with 4 DOF. Each finger has 4 joints with 3 DOF. The movement of the first joint of the thumb and the fingers allows adduction and abduction. The second, third, and fourth joints allow anteflexion and retroflexion. The main difference between the thumb and the fingers is that the fourth joint of the fingers is actuated by the third servomotor through a planar four-bars linkage mechanism. In conclussion, the Gifu Hand III has 20 joints with 16 DOF.
Grasping:
The algorithms required by the hand to provide grasping abilities of different objects are under development. This is the first step towards in-hand manipulation, which is the final goal of this research line.
Learning and mimic of human objects manipulation:
To obtain capacity levels close to human beings when manipulating objects and tools, an approach based on the learning process of the human beings is considered. The starting point is an initial observation and a subsequent imitation of the human manipulation sequences to reproduce the movement. The first difficulty is to find how observation and execution are conected, which means to observe the movements in the human hand and implement these movements in the motor activation programs of the robotic hand.