Humanoides
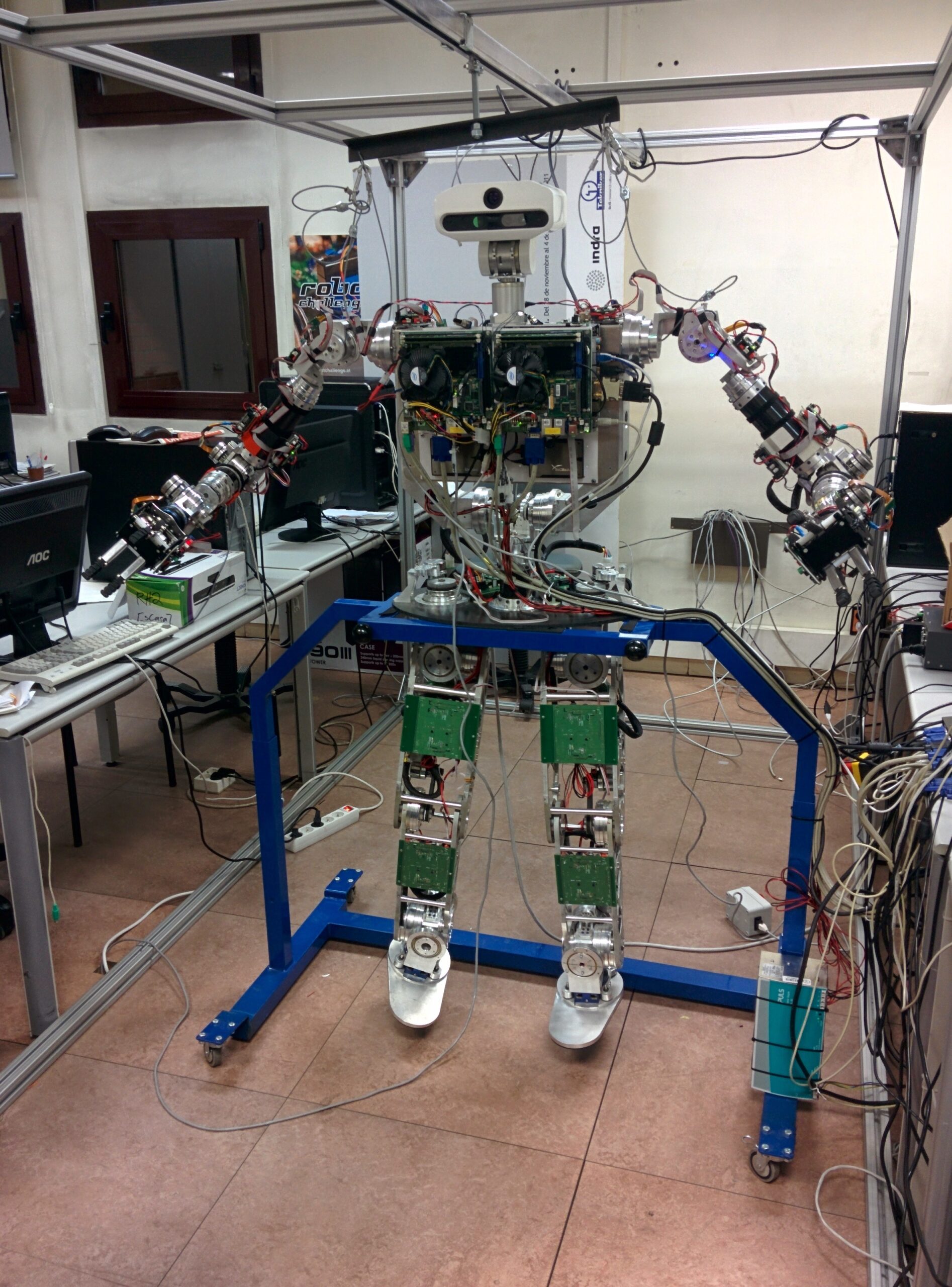
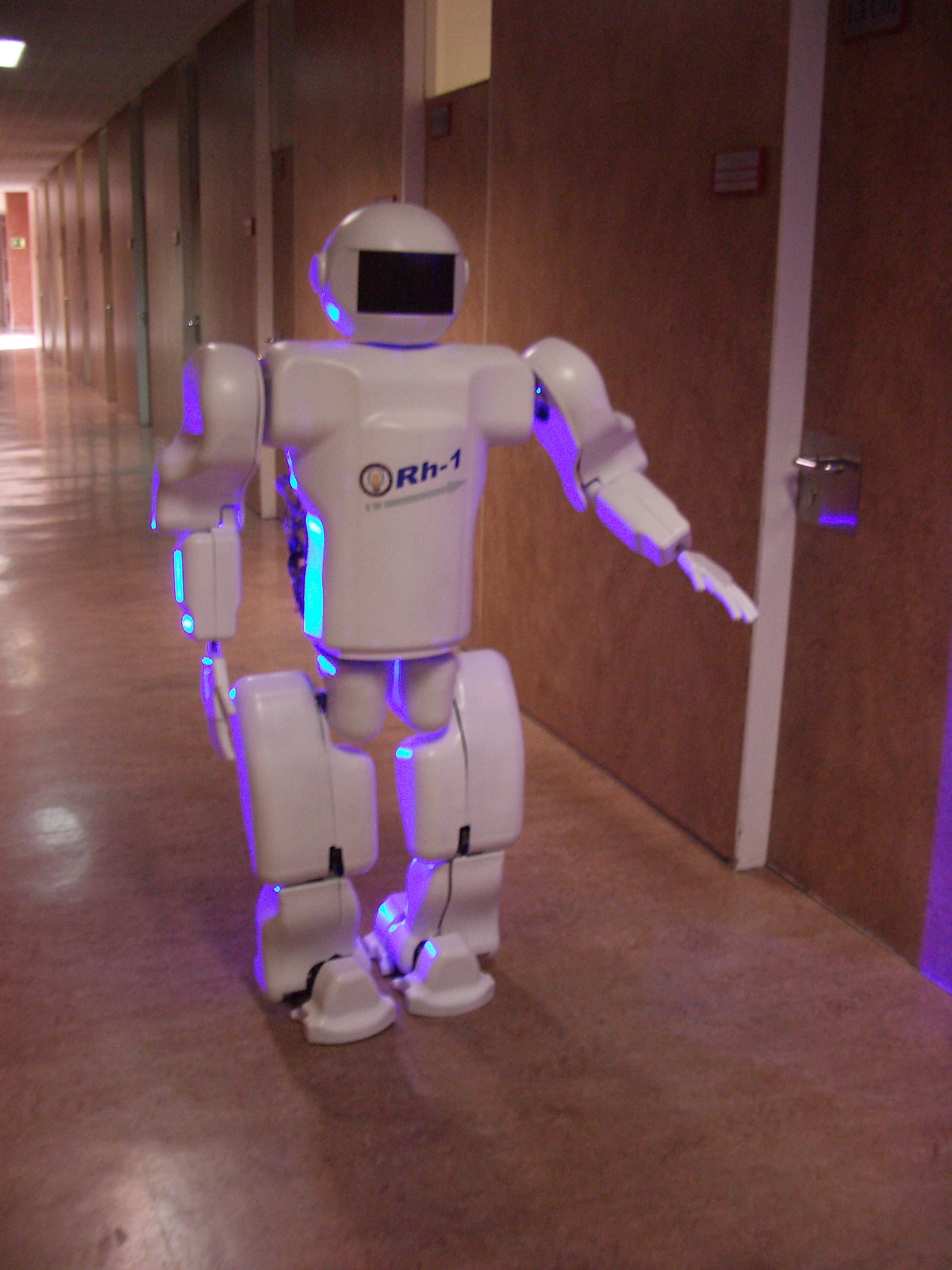
El programa de robots humanoides del RoboticsLab comenzó en 2001 desarrollando el robot bípedo Leroy de 7 grados de libertad (DOF). Desde 2002, el proyecto Rh-0, y luego el proyecto Rh-1, tuvieron como objetivo desarrollar un robot de tamaño completo de 21 grados de libertad (DOF).