





 Search on projects
Search on projects
Development of a control system for an auxiliary system for a frigate
Start year: 2019 - End year: 2019
Funder: INDRA SISTEMAS, S.A.
In the project, the automation of an auxiliary system of the surveillance device of a frigate is carried out. Programming of the control system, communications between control equipment and testing of electromechanical elements of the system are carried...

Analysis of the results of neural networks trained for the detection...
Start year: 2019 - End year: 2020
Funder: CARTONPLAST IBERICA S.L.
Analysis of the results of neural networks trained for the detection of defects in plastic plates for packaging. It is about carrying out the supervision and validation of a learning system for defects in plastic sheets intended for packaging. Both...

RoboCity2030 Madrid Robotics Digital Innovation Hub
Start year: 2019 - End year: 2022
Funder: Community of Madrid
RoboCity2030 is constituted as Madrid Robotics Digital Innovation Hub based on three pillars: Science of Excellence (in the fields of health, inspection, agriculture and SME industry), Science of Excellence (in the fields of health, inspection,...

Robots sociales para la estimulación física, cognitiva y afectiva de...
Start year: 2019 - End year: 2022
Funder: Ministerio de Ciencia e...
The final goal of this project is to study the use of social robots to improve the quality of life of the elderly. In order to maintain their wellbeing for a longer period of time, it is essential that they remain mentally as well as physically...

Robot for autonomous sub-surface characterization and remediation
Start year: 2019 - End year: 2020
Funder: CHEVRON U.S.A INC.
Analysis of possible application of autonomous underground
robotic systems for subsurface characterization and remediation.

Development of an object and presence detection system for automated...
Start year: 2018 - End year: 2018
Funder: DOMO GESTORA DE VIVIENDAS, S.L....
Homes tend to be automated to facilitate use by the elderly and people with any type of difficulty. The project tries to implement protection systems that anticipate and anticipate possible accidents from the use of these automated systems. For this, the...
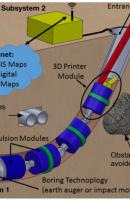
Robot for autonomous underground trenchless operations, mapping and...
Start year: 2017 - End year: 2019
Funder: European Union - HORIZON 2020
The HORIZON 2020 project BADGER (Robot for Autonomous underground trenchless operations, mapping and navigation) is one of the few funded projects in the last LEIT ICT 25 2016 Call (7,4% of success). The RoboticsLab of the University Carlos III of...

Rethinking Robotics for the Robot Companion of the Future
Start year: 2017 - End year: 2020
Funder: European Union
The RoboticsLab of the University
Carlos III of Madrid participates in the RoboCom++ (Rethinking Robotics for the Robot Companion of the future) international research project under FLAG-ERA Second Joint Transnational Call.