Active
2D / 3D modelling
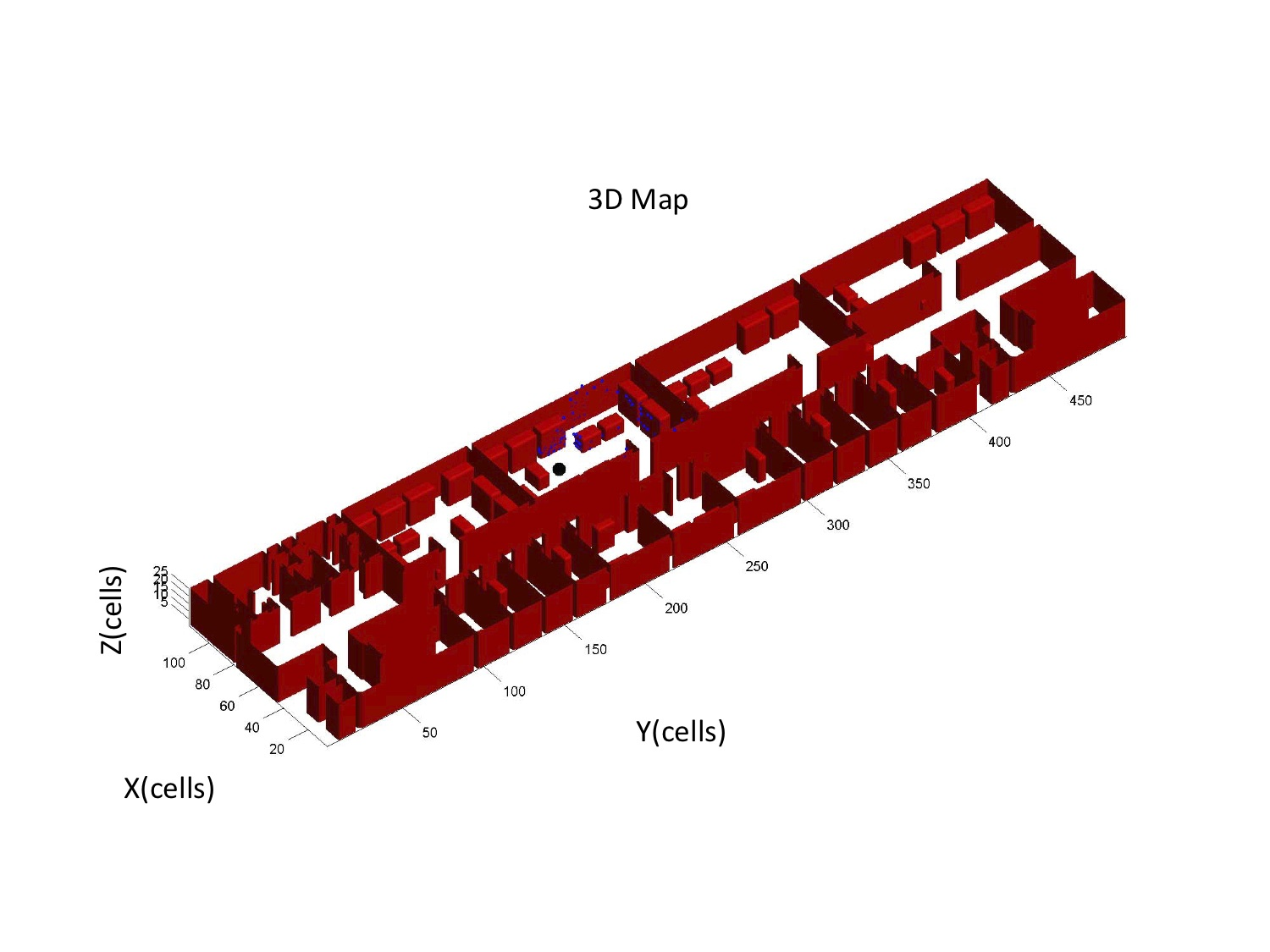
The main objectives of this research area include Global Localization, Scan Matching, Loop Detection, and SLAM in 2D and 3D

The main objectives of this research area include Global Localization, Scan Matching, Loop Detection, and SLAM in 2D and 3D

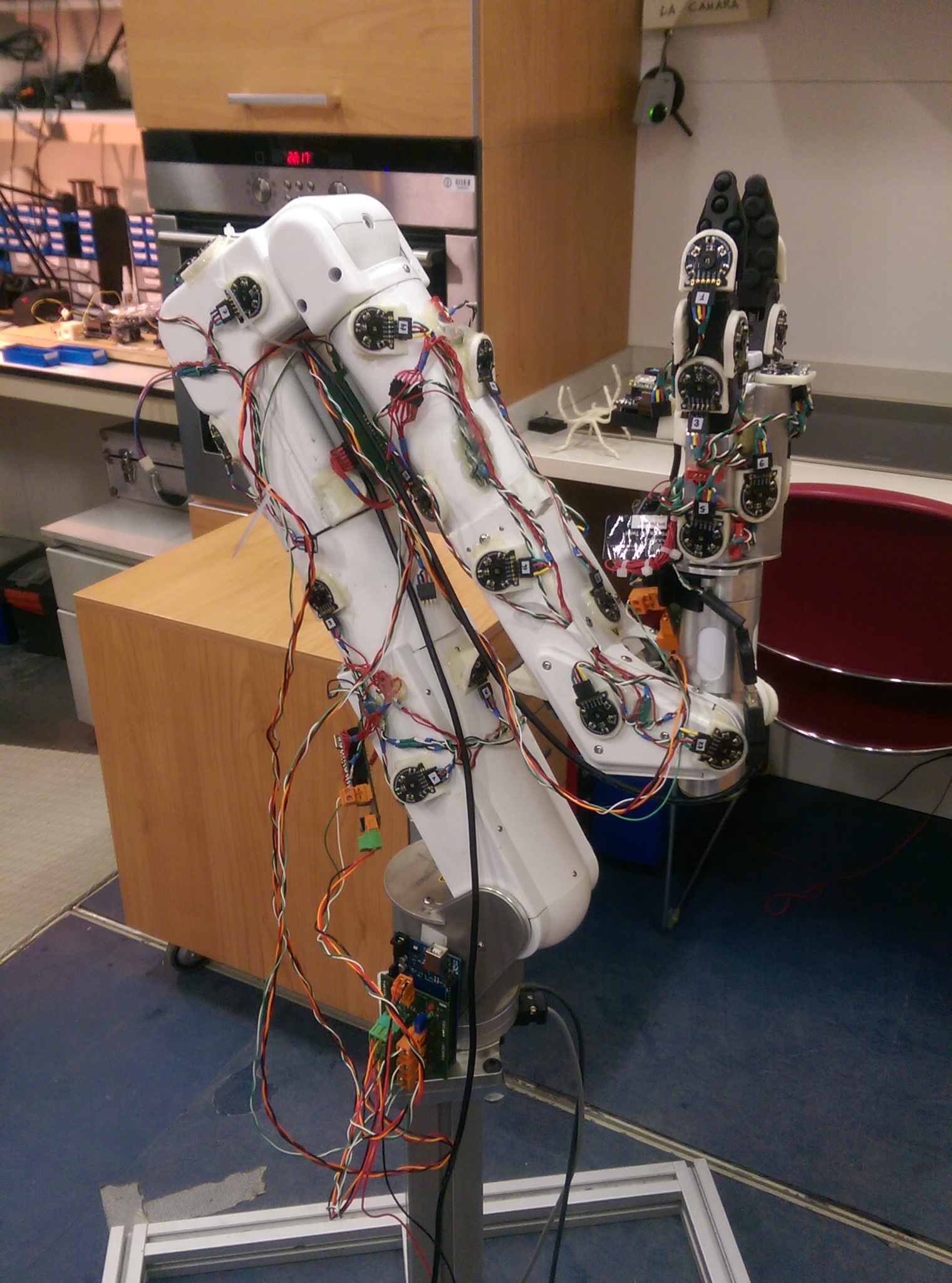
The main objective of this research area is the arm control and planning of the LWR-UC3M-1, robotic arm of MANFRED-2.
The main goal of this research area is the development of Electroactive Polymer (EAP) based Bio-inspired Intelligent Materials and Mechanisms.

The main goal of this research area is to design and develop really portable assistive robotic devices able to be
The main objective of this research area is the development of a system that automates the construction process. The system

The main objective of this research area is to introduce the new automation and robotics processes in the construction sector.

Biomedicine and robotics are destined to find common points and give rise to hybrid disciplines with a wide scope of
RoboticsLab is located at Leganes Campus of the Carlos III University of Madrid, about 10 kilometers south of central Madrid. Our offices are at the third floor of the Agustin de Betancourt building (marked 1 in the map).