

Advances in Soft Robots Control
Format
Full-day workshop. November 4th,
2019.
Title
Advances in Soft Robots Control
Main
Organizer
Concepción A. Monje,
RoboticsLab, University Carlos III of Madrid, Spain. Phone: +34 91 624 6013;
Email: cmonje@ing.uc3m.es;
URL: http://roboticslab.uc3m.es/roboticslab/people/ca-monje

Co-organizers
Helmut Hauser,
Faculty of Engineering, University of Bristol, United Kingdom. Phone: +44
(0) 117 331 5033; Email: helmut.hauser@bristol.ac.uk;
URL: http://www.bristol.ac.uk/engineering/people/helmut-hauser/index.html

BioRobotics Institute, Scuola Superiore Sant’Anna, Pisa, Italy. Phone: +39 050
88 3486; Email: cecilia.laschi@sssup.it;
URL: http://sssa.bioroboticsinstitute.it/user/57

Objectives
Introduction:
The emerging field of soft robotics is nowadays
looking at innovative ways to create and apply robotic technology in our lives.
It is a relatively new domain in the field of robotics, but one that has a lot
of potential to change how we relate with robots and also how they are used.
The term “soft robot” describes a system that is inherently soft
yielding a complex dynamics and a passive compliance similar to the biological
counterpart. As this was a new design paradigm for the hardware, methods or
algorithms to prescribe the robotic system a certain dynamics changed as well.
Motivation:
Classical control approaches in robotics are
nonlinear model based. However, the highly complex and nonlinear models
necessary for a soft robotic system make this approach a difficult task and
therefore seem to come to a limit in the presence of a soft robot. Therefore,
other methods have been applied seemingly being more useful in this context,
such as learning-based control algorithms, model-free approaches like bang bang
control, control algorithms motivated by neuroscience, or morphological
computation. These methods add new perspectives to the well known model-based
approach. We want to provide an inter- and cross-disciplinary platform to
discuss techniques, conventional as well as novel, that are currently applied
and developed and discuss limitations, potentials and future directions.
Contribution:
The workshop will bring together experts in the
above mentioned control methods as well as people with neuro-scientific and
biology background in order to discuss the following issues:
–
How
are control loops set up in biology (from a biological and neuroscientifical
point of view)?
–
Requirements
of each method in order to apply them on a real system.
–
Is
there a theoretical background, proving that the method works?; passivity,
robustness, Lyapynov stability, others.
–
Limitation
of the control approaches.
–
Are
there specific tasks / trajectories / applications for which each method is
applicable?
Goals of the
workshop:
–
Answer
the question: “Do we have to rethink the basic approach in robot control,
which is model based, when it comes to controlling soft robotic systems?”.
–
Identify the best experimental testbeds for soft robot control evaluation.
–
Contribute
to the field by giving the audience a structured review of existing control
methods for these systems, including the above-mentioned bullets.
Topics of interest
·
Soft
robotics concepts and foundations
·
Modeling
of soft robots
·
Model-based
control of soft robotic systems
·
Model-free
control approaches of soft robotic systems
·
Main
soft robotic applications and testbed platforms for experimental validation
Invited Speakers
1.
Concepción
A. Monje (RoboticsLab, University Carlos III of Madrid). Control of soft links.
2.
Akira Fukuhara (Tohoku University, Japan). Decoding body-limb coordination mechanism underlying animal locomotion.
3.
Martin Garrad (SoftLab, University of Bristol and Bristol Robotics Laboratory). Controlling soft robots without electronics.
4.
Christian Ott (DLR Germany). Nonlinear control of a soft robotic neck.
5.
Dorin
Copaci (RoboticsLab, University Carlos III of Madrid). Flexible SMA actuators for soft exoskeletons.
6.
Egidio Falotico (BioRobotics Institute Pisa). Learning-based
controllers for soft robotic manipulators.
7.
Xin Dong (Department of Mechanical, Materials and Manufacturing Engineering, University of Nottingham). Soft robotics for inspection and repair in industrial applications.
8.
Jian
ZHU (National University of Singapore). Soft active origami robot.
9.
Michael T.
Tolley (University of California, San Diego). Control of untethered soft robots.
The invited speakers work in a wide variety of
areas in soft robotics, from modeling to control, which contributes to a
significant representation of the state of the art in this field.
Structure of the event
–
A
mix oral-interactive session will be followed. Apart from the standard oral
presentations during the Workshop session (invited speakers), interactive (poster
or screen) sessions will be arranged in order for younger
researchers/other workshop participants to spread their research within the IROS
community.
–
Each
poster will get a teaser talk within the workshop program in order to motivate
the interaction with the rest of participants.
– At
the end of the session, a time slot will be devoted to bring the main
contributions into discussion (posters included), giving the opportunity to all
Workshop participants to discuss the results achieved.
Submissions
20 to 30 contributed papers
(2 pages) will be accepted as poster papers based on their quality,
originality, and relevance to the workshop. Authors of selected papers will be
asked later to submit extended versions of their papers for a special issue in the
Journal of Advanced Robotic Systems (IJARS), International Journal of Humanoid
Robotics (IJHR) and Journal of Robotics. Submitted papers should not be under
consideration for publication anywhere else. Submission of papers and review
process will be handled through the following email account: cmonje@ing.uc3m.es. Please, prepare your submissions following the IROS
paper format.
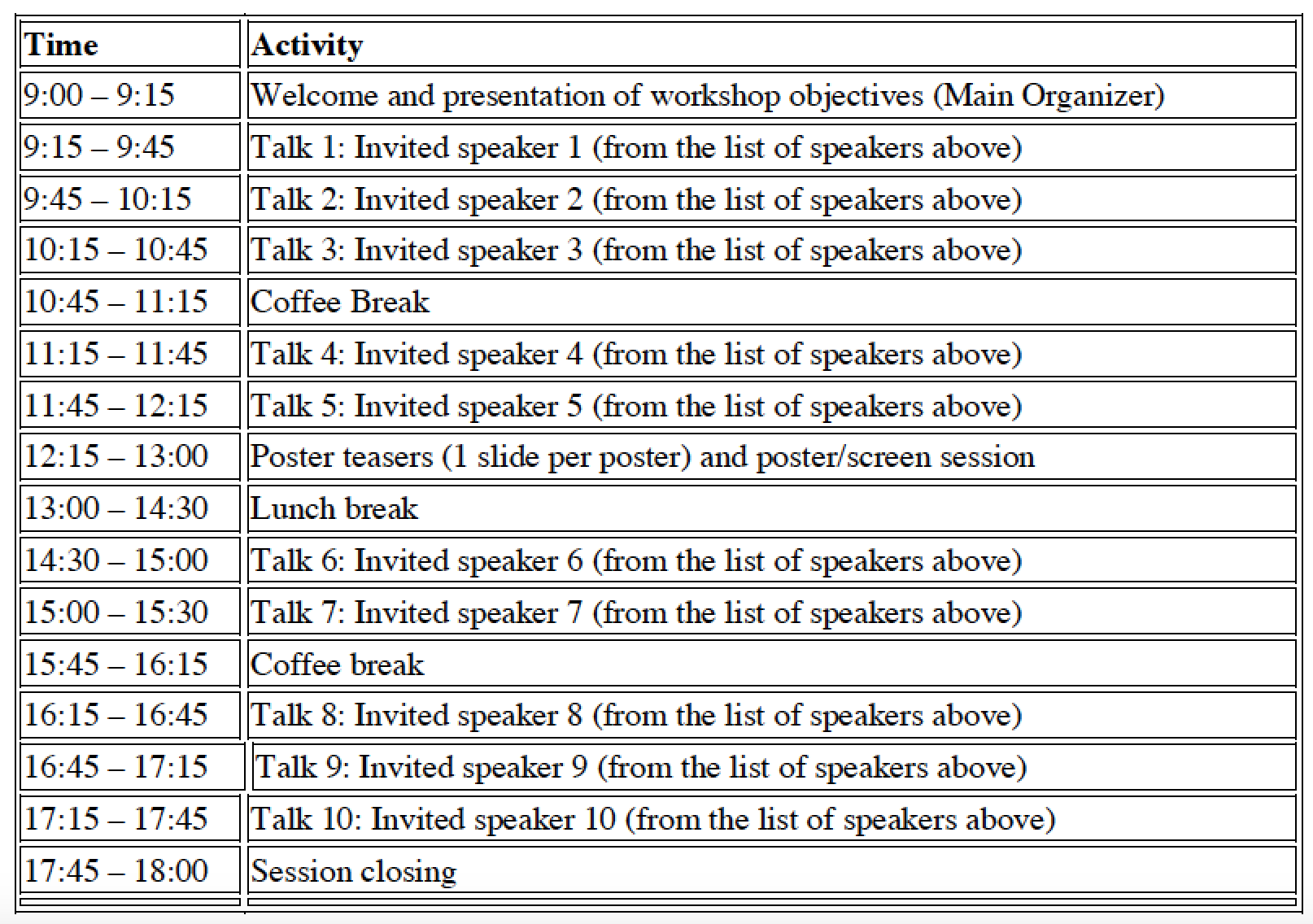
Program
Important dates
- Papers submission deadline: July 7th, 2019
- Acceptance notification: July 31st, 2019
- Camera ready deadline: October
1st, 2019 - Registration deadline: see
IROS website - Workshop date: November 4th,
2019
Support/Endorsement
The
organizers of this Workshop have the support of the IEEE RAS Technical
Committee on Soft Robotics.
![]()
![]()
![]()
![]()